VVPubl 2003:165
BWIM-mätningar 2002 och 2003
Slutrapport

1 BWIM
– VÄGNING AV TUNGA AXLAR I FART
1.1 Inledning
Denna rapport är en slutrapport av projektet som pågått i två år. Förutom resultaten redovisas projektmål, försöksprogram och analysupplägg. Rapporten innehåller också ett avsnitt om det fordon som använts vid kalibrering av mätsystemet, kontroll av mätplatserna samt ett resonemang om statistiska förutsättningar för olika generaliseringar
Mätningarna startades 2002, under detta år mätte projektet på totalt 15 platser. Rapporten innehåller resultat från 11 av dessa. Fyra har måst utgå på grund av olika problem på mätplatserna såsom skadegörelse, olyckor etc. Under 2003 har jämförande mätningar i avsikt att validera systemets driftsäkerhet och prestanda genomförts i Östergötland på tre mätplatser. Under 2003 har två produktions-mätningar genomförts, på riksväg 40 vid Landvetter respektive Europaväg 4 vid Mjölby.
När det gäller analysresultaten är det viktigt att påpeka att vi för flertalet av mätplatserna endast har analyserat en veckas mätningar varför resultaten skulle kunna förändras om en betydligt längre mätperiod analyseras. Dock tyder våra erfarenheter på att förändringarna i sådana fall inte skulle vara av betydande storlek. Det kan vara riskabelt att generalisera mätresultaten eftersom mätplatserna inte är ett slumpmässigt urval och vi endast har mätt vid ett tillfälle under året.
Rapporten är sammanställd av Tomas Winnerholt på sektionen för vägteknik, som också samordnat analysen. Övriga författare är Benny Ersson VM som också lett mätningarna samt Gösta Forsman Trafikantavdelningen, Leif Sjögren VTI och Arne Lindeberg som också har varit projektledare för B-WIM projektet. Synpunkter rörande SiWIM-systemets hantering i fält har lämnats av fältorganisationen genom Vägverket Konsult (Trafik) försorg. Dessa synpunkter är sammanställda av fältpersonalen.
1.2 Slutsatser
- Vi har ett problem med överlaster detta gäller både bruttovikt och axellaster. Övervikt på axellaster innebär att vi har fellastade fordon som i och för sig klarar bruttovikten men skapar onödigt vägslitage.
- Vi behöver öka vår kunskap om de faktiska lasterna. Även utan överlaster kan i en del fall de faktiska lasterna, uttryckt i antal standardaxlar per fordon (den s.k. B-faktorn) vara högre än vad vi tidigare antagit. B-faktorn och förekomst av överlaster samvarierar inte. B-faktorn varierar mer än vad som tidigare antagits.
- Vi behöver veta mer om hur faktiska laster varierar i relation till andel tung trafik. Den information som vi via projektet fått från ett fåtal platser behöver följas upp och kompletteras.
- De system vi köpt in är avsedda för riktade undersökningar. Metoden lämpar sig bäst för tillfälliga installationer under kortare perioder, mindre än tre veckor.
- Under testerna med långtidsmontage, mer än tre veckor, av utrustningarna framkom en del problem främst rörande lagring av data samt tillförlitlighet av varningssystemen i utrustningarna. Under dessa kontrollmätningar har vi uppnått goda resultat vid tre av fyra montage. Mätningarna har genomförts, i princip kontinuerligt, från mars till oktober.
- Om långtidsmontage, mer än tre veckor, skall tillämpas måste mellanliggande kontrollmätningar mot känd last utföras. Systemen är inte avsedda för permanenta installationer.
- Vi har tillgång till en mätmetod som med
tillräcklig noggrannhet gör det möjligt att få en tillståndsbild från
olika mätplatser.
- Validering av fordonsklassificeringen i systemen med hjälp av videofilmning på några platser har genomförts. Denna videofilmning analyserades och jämfördes sedan med det som systemen lagrat. En mycket god överensstämmelse mellan registrerade fordon i SiWIM-systemen och de som filmats kunde konstateras.
- Kompetens och kunskap måste byggas upp och spridas i organisationen.
- De hastigheter som mätts upp tyder på en något hög medelhastighet.
Utveckling av mätmetod och framtagning av en metodbeskrivning har genomförts i nära samarbete med ZAG och CESTEL i Ljubljana. Metodbeskrivningen som skrivits är författad av ZAG och finns i en engelsk version som fältorganisationen använt under arbetet 2003. Det är mycket viktigt att metodbeskrivningen följs och att mätplatserna dokumenteras utförligt.
1 BWIM
– VÄGNING AV TUNGA AXLAR I FART
2.5 Förslag
till mätstrategi för fortsatta mätningar
2.5.2 Förslag till
fortsättning
3.3.1 Mätplatser för samtliga
B-WIM mätningar under projekttiden.
3.3.2 Mätplatser – testmätningar
inom B-WIM projektet, 2003
3.3.5 Mätplatser Region
Mälardalen
3.3.6 Mätplatser Region
Sydöst
4.1.2 Planerade mätplatser
2002 - Mätprogram WIM 2002
4.2 Trafikflöden
som mätts upp
4.2.1 Uppmätta trafikflöden
2002
5.5 Slutsatser
från 2003 års mätningar
6.3.1 Kommentar om
bruttoviktanalyserna ur tidsperspektiv.
6.3.2 Kommentar om
bruttoviktanalyserna ur viktperspektiv.
6.6.1 Överlast, alla tunga
fordon
6.6.2 Överlast, tunga fordon
med bruttovikt lika med eller större än 35 ton
6.6.3 Överlast, fordon med
bruttovikt mindre än 35 ton
6.7 Standardaxlar
per tungt fordon
6.8.1 Allmänna
ställningstaganden inför analyserna
6.8.2 Analysprogrammet,
SiWIM-D
6.8.3 Efterbearbetning av
resultaten
6.9.1 Resultat Region
Mälardalen, Strängnäs
6.10.1 Enskilda
fordonstypers laster, exempel
6.10.2 Exempel på
redovisningar av total passerad vikt
7 KALIBRERINGSBIL
OCH VÄGYTANS EGENSKAPER VID MÄTPLATSERNA
7.3 Slutsatser
från jämnhetsmätningarna
7.4 Beskrivning
av längsprofil, IRI, megatextur och spårdjup
7.4.2 IRI-International
Roughness Index
7.5 Kontroll
av påverkan från temperaturvariationer i bron
7.6 Kontroll
av axelöverfarter mha videoanalys
7.7 Resultat
av kontrollmätningar i samarbete med polisen
8 GENERALISERINGAR
AV MÄTDATA I TID OCH RUM
8.2 Mått
och modeller för generalisering av mätdata
8.2.1 Generalisering av
mätdata i tid och rum
8.3 Datakällor
som kan utnyttjas för stratifiering av vägnät
8.3.1 Undersökningen Inrikes
trafik med svenska lastbilar (UVAV)
8.6 Sammanfattning
och fortsatt arbete
9 TEKNISK
UTVÄRDERING AV SiWIM-SYSTEMET
11.1 Resultat
från mätningar 2002
11.1.1 Resultat Region
Mitt, VM2 - Örnsköldsvik
11.1.2 Resultat Region
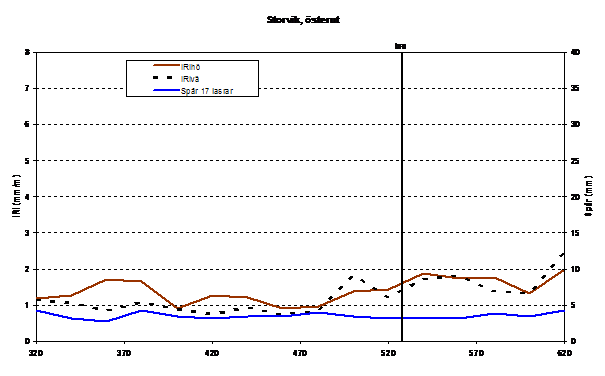
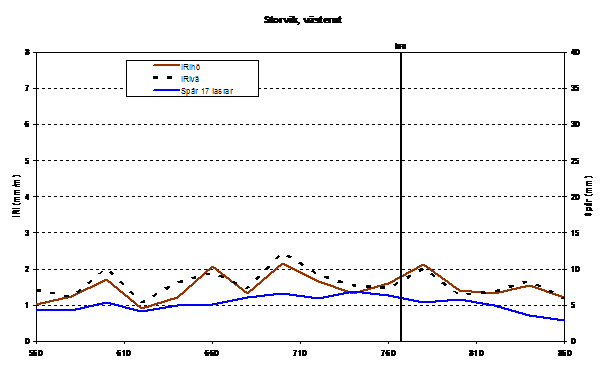
Mitt, VM3 - Storvik
11.1.3 Resultat Region
Mälardalen, VMN2 - Västerås
11.1.4 Resultat Region
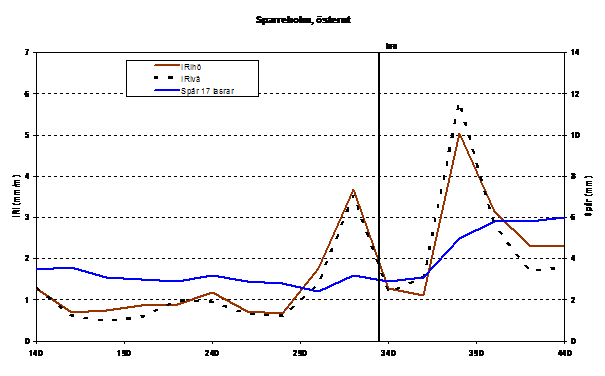
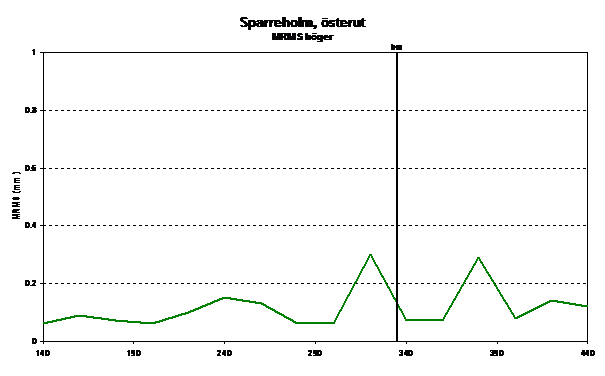
Mälardalen, VMN4 - Sparreholm
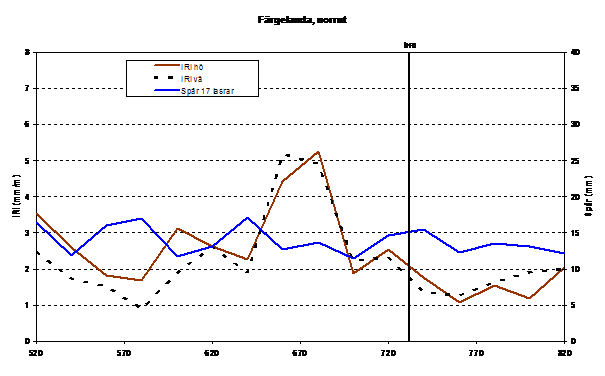
11.1.5 Resultat Region
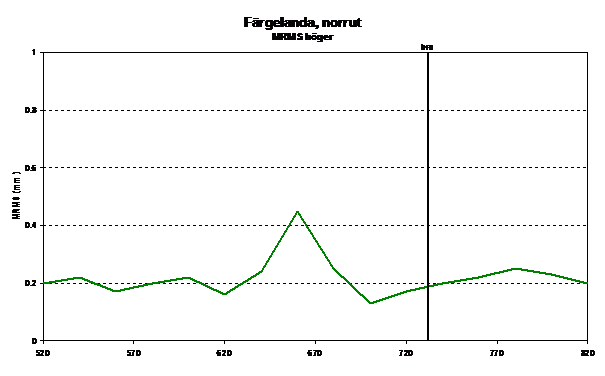
Väst, VVÄ1 - Färjelanda
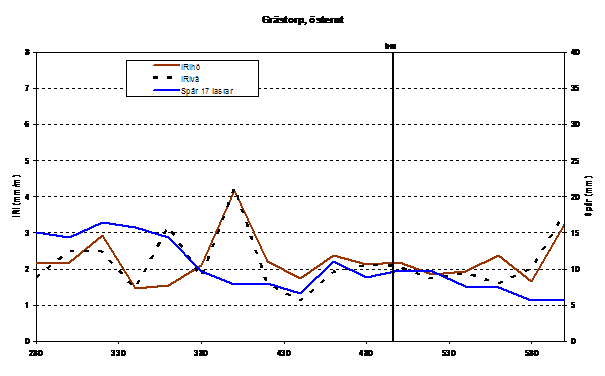
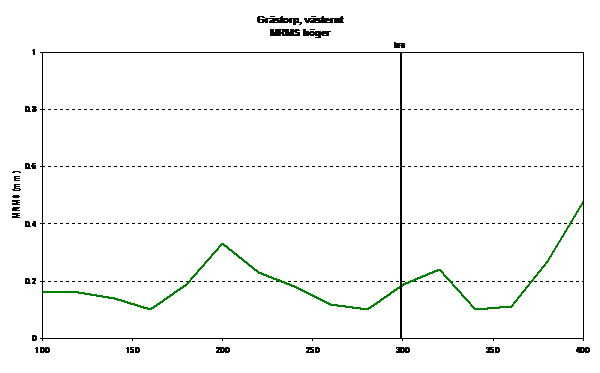
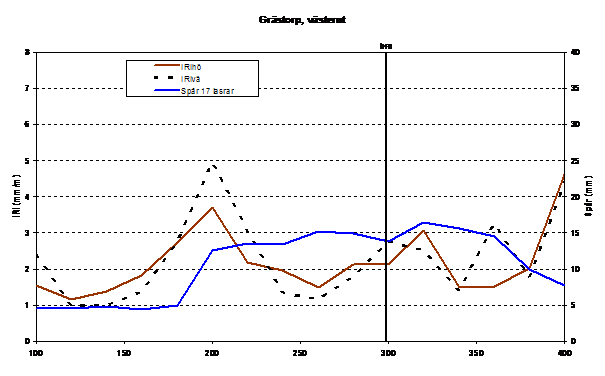
11.1.6 Resultat Region
Väst, VVÄ3 - Grästorp
11.1.7 Resultat Region Väst
- VVÄ4 - Kinna
11.1.8 Resultat Region
Sydöst, VSÖ1 - Forserum
11.1.9 Resultat Region
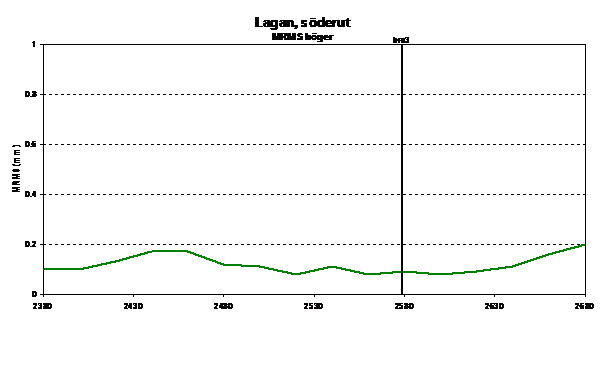
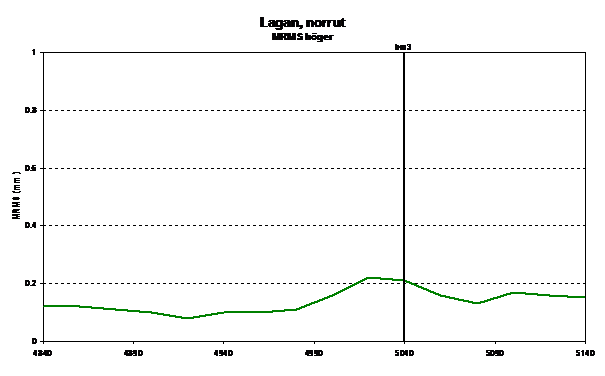
Sydöst, VSÖ2 - Lagan
11.1.10 Resultat Region
Sydöst, VSÖ3 - Kalmar
11.2 Kartor
över vissa brolägen
11.3 Fordonsklassificeringstabell
11.4 Data
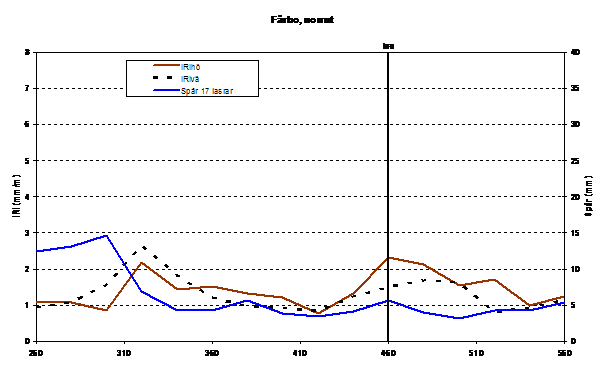
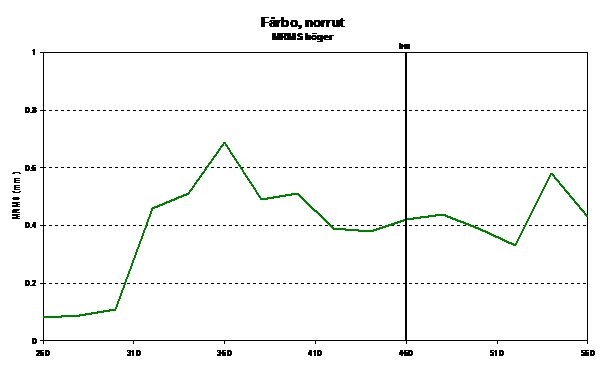
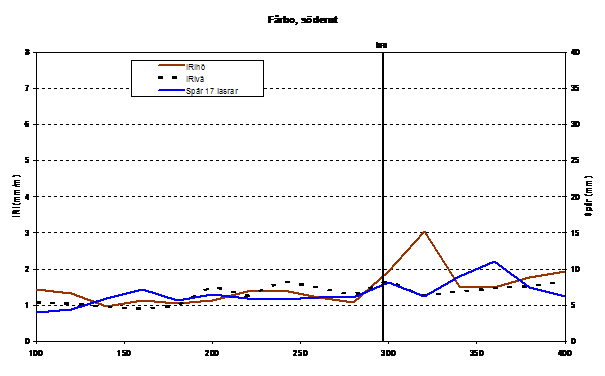
från jämnhetsmätningar
13 Bilagor från statistisk analys
13.2 Karta
från testkörning i Samgods/STAN
13.3 Sammanställning
och analys av data från mätplatserna
13.3.1 Skillnad mellan
BWIM-mätningar och mätning av ÅDT
13.3.2 Mätning av ÅDT med
Metor 2000
13.4 Urval
av mätplatser, statistisk analys
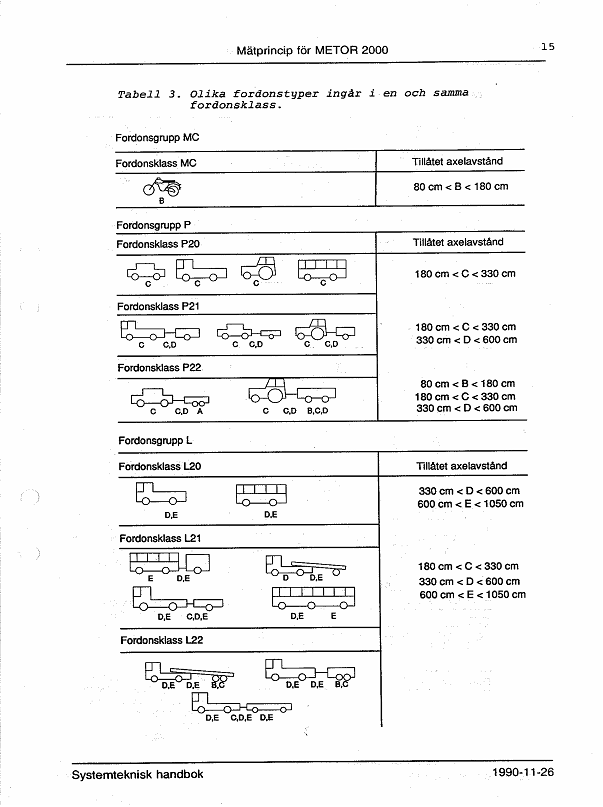
13.5 Fordonsklassificering
enligt Metor
2 PROJEKTBESKRIVNING
2.1 Bakgrund
Axellaster från tunga fordon svarar för en mycket stor del av nedbrytningen av det belagda vägnätet. Det är därför viktigt att ha information om den tunga trafikens omfattning och vilka vikter som belastar vägnätet. I mitten av 80-talet etablerades ett antal fasta vågstationer för mätning av fordon i fart. Tyvärr visade det sig att tekniken då inte var tillräckligt bra varför försöken avbröts.
Vikten hos tunga axlar har varit dyrt och omständligt att mäta. Under de senaste åren har ny teknisk lösning utvecklats av ett företag i Slovenien. En färdig mätprodukt (SiWIM-systemet) finns nu att tillgå som är väsentligt enklare och billigare än de alternativ som tidigare funnits. I detta fall är det fråga om en flyttbar mätutrustning där ett antal töjningsgivare monteras i en bro, denna teknik kallas Bridge-Weigh-In-Motion, (B-WIM). När brons reaktion på en känd last (kalibreringsbil) är känd kan även andra fordons bruttovikt och axellaster beräknas.
Sommaren 2001 testades denna mätmetod vid Kyrkdal utanför Kramfors. Mätmetoden visade sig vara lovande samtidigt som mätresultaten pekade på omfattande överlaster. Vägverket beslutade därför att genomföra utökade försök på ett antal platser i landet under 2002 och 2003. Syftet med försöken var att få en uppfattning om den tunga trafikens sammansättning med avseende på laster och förekomst av överlaster. Projektet syftade också till att utvärdera mätutrustning och att utveckla mätmetoden.
2.2 Hypoteser
De hypoteser som ställts upp var att genom riktade studier kunde:
· Få en uppfattning om faktiska laster på speciellt utvalda (intressanta) platser/sträckor
· Få en uppfattning om storleksordningen på hur mycket faktiska laster kan avvika från vad som generellt antagits utifrån andel tung trafik och antaganden om fördelning på lastat/olastat.
· Få en uppfattning om olika lastfall (lastfördelning på olika axelkombinationer) och för broar även lastlägen i tvärled.
· Få en uppfattning om storleksordningen av överlaster (storlek och frekvens)
· På provsträckor koppla uppmätta deformationer och nedbrytningshastigheten till faktiska laster.
Antagandet var vidare att genom kontinuerliga mätningar med stickprovsförfarande, som gör det möjligt att generalisera mätresultaten till ett vägnät, kan vi:
· Få underlag för att omsätta tung trafik till laster på vägnätet.
· Löpande följa vägnätets nyttjande avseende laster. Genom att för axlar och bruttovikt följa
o Omfattning
o Fördelning lastat/olastat
o Last i förhållande till max tillåten last
· Få en uppfattning om faktiskt utnyttjande (”fyllnadsgrad” i olika avseenden)
· Ange storlek och frekvens av överlaster.
· Löpande beräkna sannolikheter för olika lastfall.
· Söka samband mellan uppmätta skador och faktiska laster.
2.3 Projektidé
Projektets grundidéer var att:
· Visa om tillgänglig mätutrustning och lämplig mätmetod kan ge en tillfredsställande noggrannhet.
· Genom mätning i ett begränsat antal punkter
- Få en uppfattning om hur verkliga axellaster kan variera i förhållande till de antaganden som kan göras utifrån flödesmätningar.
- Få en uppfattning om olika lastfall
- Få en uppfattning om storlek och frekvens av överlaster
· Utreda möjligheten att generalisera resultaten från möjliga mätplatser till ett vägnät.
· Göra troligt att genom instrumentering av ett begränsat antal broar med en liten mätorganisation och ett fåtal mätutrustningar kan få den information som behövs. (Att det är möjligt att upprätta en mätstrategi som är ekonomiskt försvarbar.)
· Göra troligt att tjänsten kan specificeras så väl att den kan handlas upp (eller beställas internt).
Av ovanstående punkter har de tre första uppnåtts. Den fjärde punkten är delvis uppnådd. Föreslagen fortsättning nedan ger på grund av kostnadsnivån en lägre ambitionsnivå avseende information än vad som annars vore önskvärt. Femte punkten är ännu inte uppfylld utan ligger något år fram i tiden. Teknikmognad och fältmässighet är ännu inte riktigt på en sådan nivå att tjänsten kan specificeras tillräckligt väl.
2.4 Mål
Under 2002 och 2003 skulle projektet:
- Kontrollera 2001 års goda resultat i VM. Verifiera mätmetoden och mättekniken.
- Utföra stickprovsmätningar för att ge en indikator på laster för några typvägar i olika delar av landet (ca 15 snitt)
- Kartlägga nytta med och behov av förändringar av dagens dimensioneringsmetodik om data för tunga axlar är kända. Görs parallellt med projektet för både väg och bro.
- Utarbeta metodbeskrivning
- Klarlägga möjligheterna att utifrån tillgängliga mätplatser (lämpliga broar) kunna representera olika delar av vägnätet.
- Utarbeta strategi för mätning av tunga axlar för att
- etablera en tillståndsbild
- dimensionera väg- och broobjekt.
Punkt ett till fyra samt punkt 6 är klara. För att färdigställa punkt fem krävs ett större dataunderlag än vad som finns tillgängligt inom projektet.
2.5 Förslag till mätstrategi för fortsatta mätningar
2.5.1 Summering av projektet
Det krävs en fortsättning på projektet för att följa upp överlastsituationen och öka kunskapen om vilka axellaster och bruttovikter som belastar vägnätet. En övergångslösning måste väljas eftersom det är för tidigt att föra in denna mättjänst i ordinarie verksamhet. Mätningarna med inköpta mätutrustningar (SiWIM) bör fortsätta under några år så att man därefter tar ny ställning till lämplig fortsättning
2.5.2 Förslag till fortsättning
Mot bakgrund av
ovanstående genomförs en fortsättning enligt följande upplägg. Fortsättningen
genomförs som ett projekt där samtliga regioner är representerade.
Mätningar genomförs i
begränsad omfattning till största delen baserat på den utrustning som redan
anskaffats. Planerad projekttid är fyra år med en kontrollstation efter två år.
Efter två år tas på nytt ställning till om det är lämpligt att fortsätta i
projektform eller om mätningarna bör handlas upp i ordinarie verksamhet.
Projektets styrgrupp ska också årligen att ta ställning till om uppnådda resultat
i relation till kostnaderna motiverar fortsatta mätningar. Projektet ska
genomföras med målsättningen att bygga upp kompetens och att förbereda för
upphandling som del i ordinarie verksamhet.
Tillgänglig mätkapacitet fördelas på tre huvudsyften:
· Nationellt kontrollprogram avseende överlaster
· Regionalt informationsbehov
· Utveckling (exempelvis mätning på provvägar och mätning för utveckling av mätmetod)
2.5.3
Försöksprogram
Försöksprogrammet baseras på följande förutsättningar:
· Fyra mätutrustningar (nuvarande innehav).
· Mätsäsong 6 månader. Mitten av april till mitten av oktober.
o En veckas mättid per mättillfälle. Det tillkommer också tid för montering, kalibrering, demontering och transport.
o Möjlig mätkapacitet: 8 tillfällen per utrustning. Teoretisk kapacitet 12 tillfällen. (Detta är en betydligt högre kapacitet än vad som hittills har uppnåtts)
o Totalt fås då 32 tillgängliga mättillfällen.
Därför föreslås tillgängliga mättillfällen fördelas enligt följande:
· Nationellt kontrollprogram: 14 st. Det ger två platser per region som mäts årligen under en vecka vid ungefär samma tid på året.
· Regionalt behov: 14 st. Varje region kan välja ut två platser per år utifrån egna önskemål.
· För utveckling återstår då: 4 st.
3 MÄTSTRATEGI
3.1 Mätsystemet
Weigh-in-motion (WIM) tekniker har använts för att mäta fordonsvikter sedan 1970-talet. Sådana system kan ge detaljerad kunskap om fordons bruttovikter, axellaster, hastigheter och axelavstånd mätt i normal trafikrytm, se Figur 3‑1 nedan.

Figur
3‑1 Principbild över SiWIM-systemet.
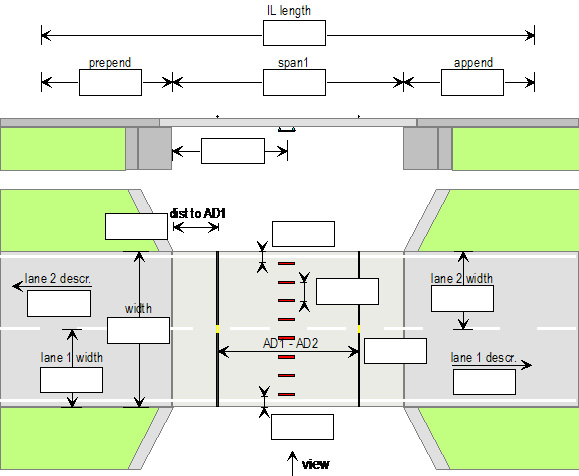
För att mäta detta används, i SiWIM-systemet, töjningsgivare som monteras på undersidan av en broplatta, se Figur 3‑2 nedan Beroende på vägbanans bredd har 8 eller 12 töjningsgivare använts. Utrustningen medger att upp till 16 töjningsgivare används.
De töjningar som uppstår då ett fordon passerar bron registreras av dessa givare. Till detta används axeldetektorer, två per riktning. I vårt fall har pneumatiska sensorer använts.
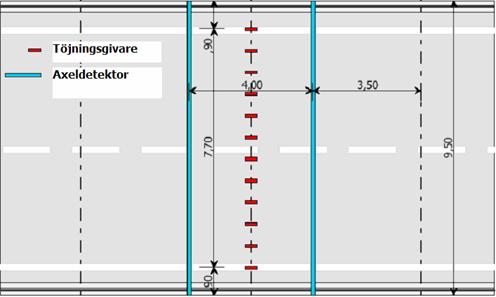
Figur
3‑2 Principiellt montage av töjningsgivare och axeldetektorer.

Bild 3‑1 Töjningsgivarna
monterade på en mätplats
Signalerna registreras av en mätdator som hanterar och lagrar dem. Mätdatorn sitter monterad i ett skåp som har två strömförsörjningskällor. Dels ström från en extern källa dels ström från ett batteri som tar över om installationen skulle bli strömlös. Skåpet innehåller även en GSM‑sändare som gör det möjligt att med hjälp av dator ringa upp och fjärrövervaka installationen. Systemet kan larma operatören om något oförutsett händer under mätningarna.
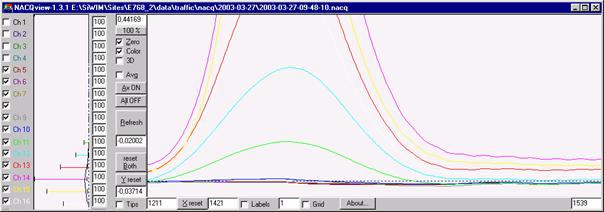
Insamlad data sänds sedan till Vägverket i Borlänge. Här analyseras och utformas data för presentation.
3.2 Val av mätplats
Val av mätplatser baseras dels på önskemål från Regionerna och dels på mätplatsernas tillgänglighet. Mätplatserna väljs ut för att ge en uppskattning av variationen i belastning utgående från egna antaganden som baserats på flödesmätningar, dessutom skall en rad med kriterier, se nedan, vara uppfylld på mätplatsen för att få till stånd en kvalificerad mätning.
- Bron skall vara av plattramstyp.
- Bron skall vara i tekniskt gott skick, inga större sprickor.
- Bron skall inte vara för kort i förhållande till sin bredd, brolängd teoretiskt acceptabel mellan 2 – 15 m
- Bron får inte vara vinklad mer än 20o mot fundamentet.
- Fritt flytande trafik, det vill säga inga trafikljus eller korsningar nära broläget.
- Vägytan skall vara jämn före och efter bron, se vidare kapitel 7.
- Tillgång till el vid bron. Detta krav kan släppas om fyra batterier används.
- Tillgång till brons undersida någorlunda enkel med avseende på vegetation, höjd, vatten etc.
- Sträckan kalibreringsfordonet måste färdas innan det kan vända får inte vara för lång.
Vid val av mätplatser har även hänsyn tagits till att skapa en jämn fördelning mellan olika vägkategorier.
3.3 Mätplatser 2002 - 2003
Under åren 2002 0ch 2003 har systemen varit driftsatta på totalt 20 mätplatser med fördelning enligt tabell. Mätplatserna har under 2002 års mätningar valts av respektive region.
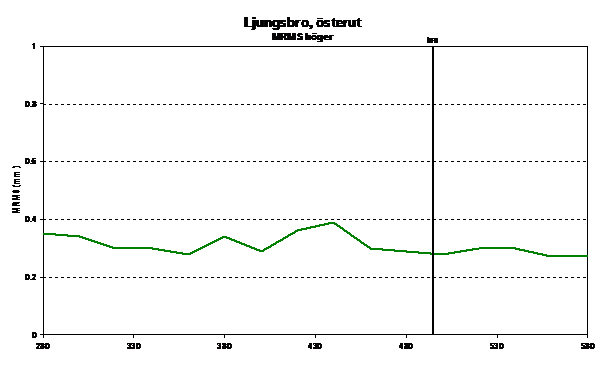
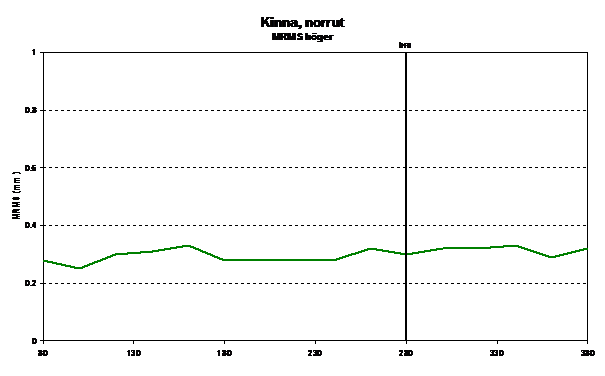
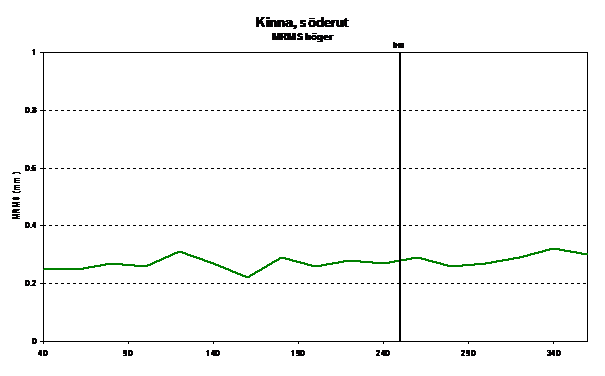
Mätningarna som genomfördes 2003 är för Mjölby och Landvetter platserna valda av respektive region. För mätplatserna vid Borensberg, Motala samt Ljungsbro är de valda för att ligga nära varandra vid den tekniska utvärderingen som skedde under 2003. Anledningen till detta är att de referensfordon som användes skulle ha nära mellan testplatserna. På så sätt kunde tester utföras samtidigt på två broar.
Tabell 3.3‑1 Uppställning av mätplatser för 2002 respektive 2003 års mätningar
|
|
2 |
0 |
0 |
2 |
|
|
VM |
VMN |
VSÖ |
VVÄ |
|
1 |
Mora |
Örebro |
Forserum |
Färjelanda |
|
2 |
Örnsköldsvik: 1 |
Västerås |
Lagan |
E 6 |
|
3 |
Örnsköldsvik: 2 |
Strängnäs |
Oskarshamn |
Grästorp |
|
4 |
Storvik |
Sparreholm |
|
Kinna |
|
|
2 |
0 |
0 |
3 |
|
|
|
|
Borensberg |
Landvetter |
|
|
|
|
Motala |
|
|
|
|
|
Ljungsbro |
|
|
|
|
|
Mjölby |
|
I följande avsnitt
redovisas lägena för samtliga mätplatser under projektet, dessutom redovisas detaljerade
brolägen för vissa broar i bilagorna.
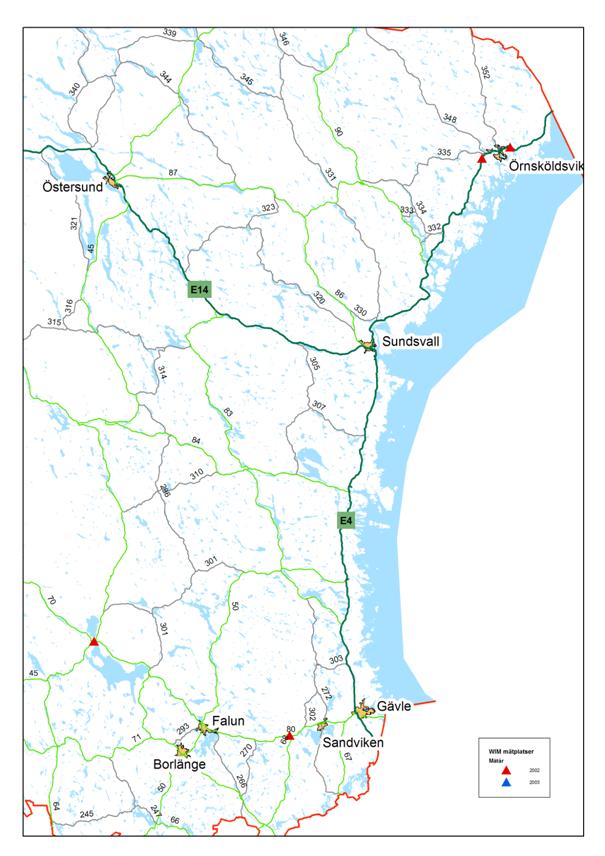
3.3.1 Mätplatser för samtliga B-WIM mätningar under projekttiden.
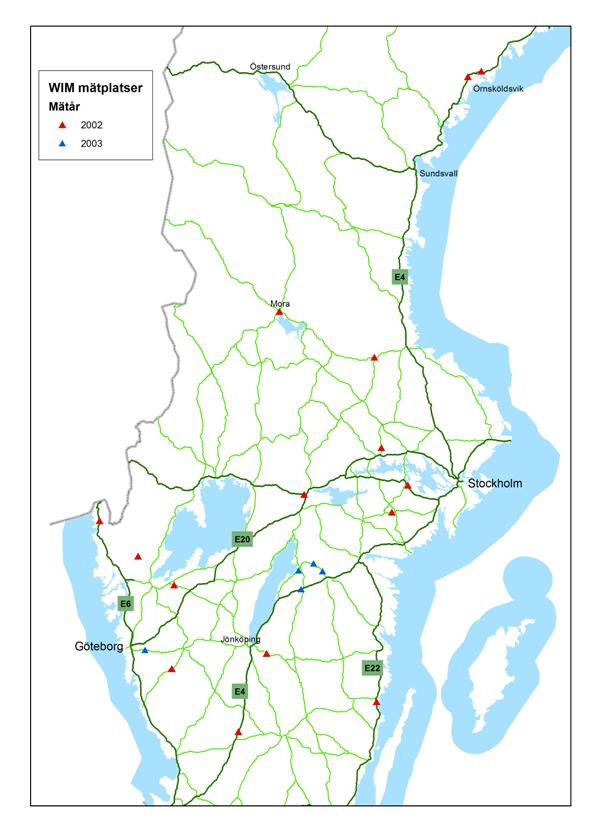
Figur 3‑3 Karta över samtliga mätplatser
3.3.2 Mätplatser – testmätningar inom B-WIM projektet, 2003
Figur 3‑4 Karta över testmätningsplatserna 2003
3.3.3 Mätplatser Region Mitt
Figur 3‑5 Karta över samtliga mätplatser i Region Mitt
3.3.4 Mätplatser Region Väst
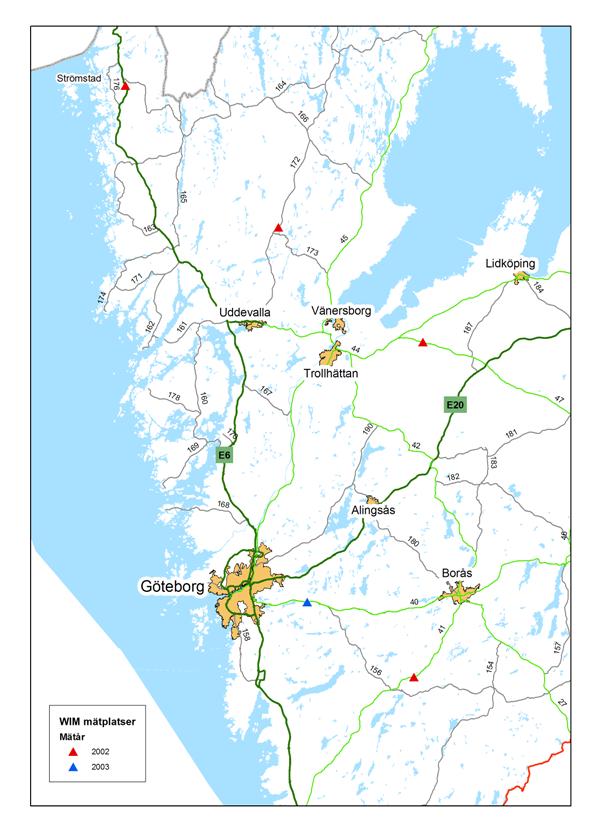
Figur 3‑6 Karta över samtliga mätplatser i Region Väst
3.3.5 Mätplatser Region Mälardalen
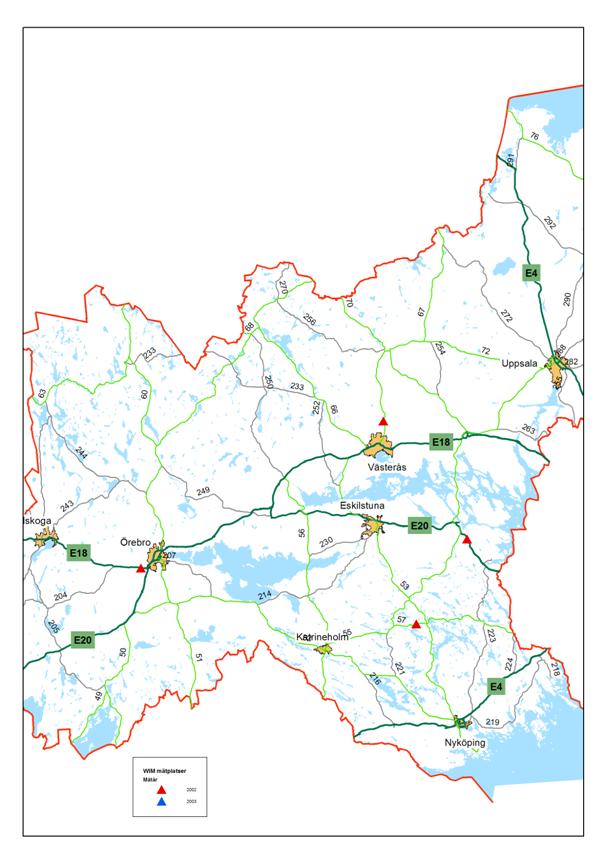
Figur 3‑7 Karta över samtliga mätplatser i Region Mälardalen
3.3.6 Mätplatser Region Sydöst

Figur 3‑8 Karta över samtliga mätplatser i Region
Sydöst
4 MÄTNINGAR 2002
Ett samarbete startades mellan projektet och trafikpolisen i samtliga län där mätningar skett.
Syftet var att trafikpolisen skulle få kännedom om projektet samt att de skulle vara delaktiga i kalibreringsmätningarna. Ett utmärkt sätt att kalibrera mätvärden från systemet är att ta del av trafikpolisens mätresultat med deras portabla vågar i direkt anslutning till mätplatsen.
4.1 Mätprogram 2002
4.1.1 Inledning
Samtliga fyra SiWIM-system kalibrerades samt driftsattes under vecka 23, 2002, utan störningar och planeringen var att de skulle mäta i cirka två veckor på varje plats. På grund av diverse driftstörningar, sabotage mm på utrustningen blev mätprogrammet reviderat vid ett flertal tillfällen och målet att hinna mäta på totalt 20 platser kunde därför inte fullföljas.

Bild 4‑1 Polisens vägning under kalibreringen av mätsystemet, fotot avsiktligt
grynigt.
(Polisvåg 63,0 ton, Wim 64,1 ton)
4.1.2 Planerade mätplatser 2002 - Mätprogram WIM 2002
Nedanstående tabeller innehåller mätprogrammet för B-WIM projektet under 2002.
ÅDT-kolumnerna innehåller data från Vägverkets register rörande årsdygnsmedeltrafiken, i bägge riktningarna, sammanlagt. Rader som är rödmarkerade innehåller mätstationer som på grund av yttre påverkan av installationerna inte analyserats.
4.1.3 Mätprogram 2002
Mätprogrammet som
beslutades för år 2002 års mätningar redovisas i Tabell 4.1‑1 nedan. Uppgifterna i ÅDT kolumnen representerar det
totala flödet i vägens båda riktningar.
|
Bet. |
Väg |
Plats |
Tidpunkt |
Län |
ÅDT* |
ÅDTtung* |
|
VM1 |
RV 45 |
Mora |
7/6- 16/7 |
W |
13 190 |
670 |
|
VM2:1 |
E 4 |
Örnsköldsvik |
17/7- 28/8 |
Y |
11 220 |
1 290 |
|
VM2:2 |
E 4 |
Örnsköldsvik |
28/8-11/10 |
Y |
11 220 |
1 290 |
|
VM3 |
RV 80 |
Storvik |
14/10- 30/10 |
X |
9 490 |
1 040 |
|
VMN1 |
E 18 |
Örebro |
5/6- 15/7 |
T |
12 159 |
1 043 |
|
VMN2 |
RV67 |
Västerås |
17/7- ? |
U |
7 085 |
1 145 |
|
VMN3 |
E 20 |
Strängnäs |
4/9- 30/9 |
D |
11 130 |
1 300 |
|
VMN4 |
RV 57 |
Sparreholm |
1/10- ? |
D |
2 290 |
170 |
|
VSÖ1 |
RV 31 |
Forserum |
4/6- 19/6 |
F |
5 490 |
690 |
|
VSÖ2 |
E 4 |
Lagan |
4/9- 19/9 |
G |
7 380 |
1 780 |
|
VSÖ3 |
E 22 |
Oskarshamn |
6/11- 21/11 |
H |
6 230 |
530 |
|
VVÄ1 |
Lv172 |
Färjelanda |
3-17/6 |
O (P) |
2 850 |
270 |
|
VVÄ2 |
E 6 |
- |
18/6- 28/8 |
O |
5 300 |
1 300 |
|
VVÄ3 |
Rv47 |
Grästorp |
2/9- 7/10 |
O (R) |
6 098 |
664 |
|
VVÄ4 |
Rv41 |
Kinna |
10/10- 22/11 |
O |
6 200 |
550 |
* Siffror från Vägverkets trafikmätningssystem, avser
summan av bägge riktningarna.
Tabell 4.1‑1 Flöden tagna ur Vägverkets trafikmätningssystem för mätplatserna för 2002 års mätningar
4.2 Trafikflöden som mätts upp
Föreliggande avsnitt presenterar de trafikflöden som mättes upp under mätningarna som genomfördes under 2002. Här presenteras typiska trafikflöden från enskild mätdag.
Beträffande mätstationerna Forserum respektive Färjelanda presenteras inga data eftersom analyserna är genomförda av ZAG i Slovenien som inte hade uppdraget att ta fram dessa data.
I kapitel 8 finns ytterligare analys utförd med avseende uppmätta flöden.
4.2.1 Uppmätta trafikflöden 2002
R1 respektive R2 i Tabell 4.2‑1 nedan representerar Riktning 1 respektive Riktning 2 på aktuell mätstation.
|
|
Flöde |
Flödetung |
Andel [%] |
Sammanlagt |
|||||
|
Bet. |
R1 |
R 2 |
R1 |
R 2 |
R1 |
R 2 |
Flöde |
Flöde,tung |
Andel |
|
Ö-vik :2 |
5050 |
5014 |
682 |
588 |
13,7 |
11,7 |
10064 |
1280 |
12,7 |
|
Storvik |
2635 |
2713 |
509 |
549 |
19,3 |
20,2 |
5348 |
1058 |
19,8 |
|
Västerås |
1276 |
3028 |
37 |
450 |
2,9 |
14,9 |
4304 |
487 |
11,3 |
|
Sparreholm |
6155 |
5453 |
763 |
583 |
12,4 |
10,7 |
11608 |
1346 |
11,6 |
|
Strängnäs |
632 |
566 |
81 |
63 |
12,8 |
11,1 |
1198 |
144 |
12,0 |
|
Forserum |
- |
- |
- |
- |
- |
- |
- |
- |
- |
|
Lagan |
2311 |
3183 |
737 |
1011 |
31,9 |
31,8 |
5494 |
1748 |
31,8 |
|
Oskarshamn |
2655 |
2833 |
304 |
336 |
11,5 |
11,9 |
5488 |
640 |
11,7 |
|
Färjelanda |
- |
- |
- |
- |
- |
- |
- |
- |
- |
|
Grästorp |
2453 |
2522 |
265 |
299 |
10,8 |
11,9 |
4975 |
564 |
11,3 |
|
Kinna |
|
|
|
|
|
|
|
|
|
Tabell 4.2‑1 Uppmätta flöden under 2002 års mätningar
5 MÄTNINGAR 2003
Under 2003 koncentrerades projektet till att genomföra valideringsmätningar och teknisk kontroll av systemen. Dessutom skulle en mätning per region göras, i mån av tid.
5.1 Mätprogram 2003
Avsikten under 2003 var att genomföra följande program:
- Montage av samtliga system inom ett geografiskt begränsat område.
- Samtliga system kontrolleras med avseende på eventuella långtidseffekter
- Mätsystemet kontrolleras med avseende på temperaturväxlingar
- Repeterbarhet i mätningar
- Fler kända laster skulle användas
- Mätning av minst en mätplats per medverkande region under 2003 efter avslutade tester.
Punkt 1 till 5 ovan har genomförts, punkten 6 genomfördes till hälften genom mätning av en mätplats i region väst samt en mätplats i region Sydöst.
5.2 Testomgång 1
Första testomgången genomfördes med start i mars månad. Tre broar i trakten kring Borensberg i Östergötland valdes ut. På en av broarna monterades två system. Detta skedde på riksväg 36 vid Ljungsbro. Avsikten var att jämföra mätningarna i de två skilda systemen för att undersöka om resultaten på de skilda systemen på något sätt blev olika.
5.2.1 Motala
Bron ligger på den relativt högtrafikerade riksväg 50 i Motala. Riksväg 50 är på det aktuella avsnittet relativt ojämn. Trots detta blev mätresultaten bra.
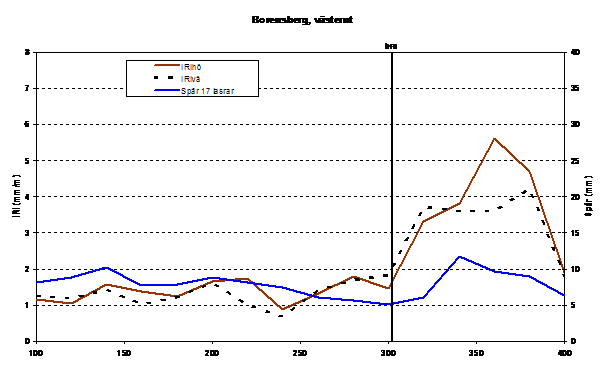
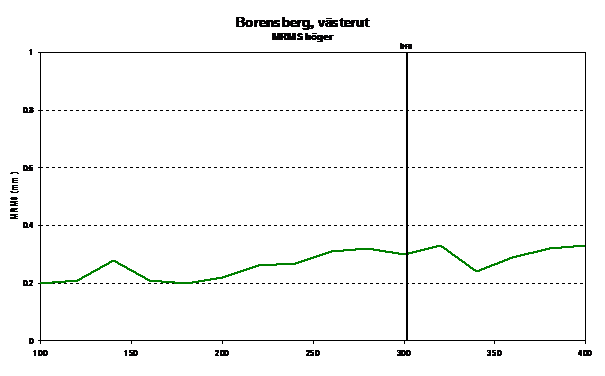
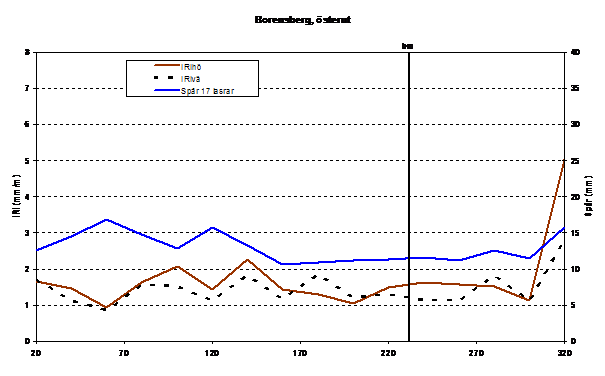
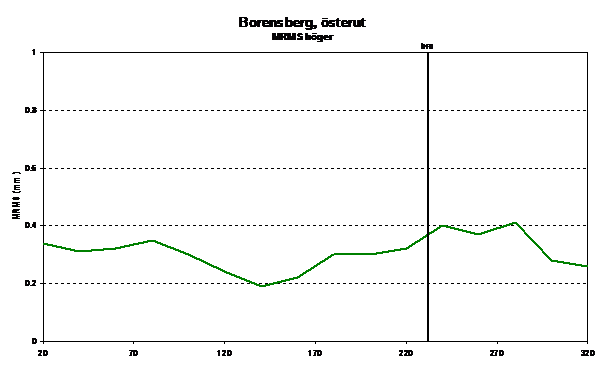
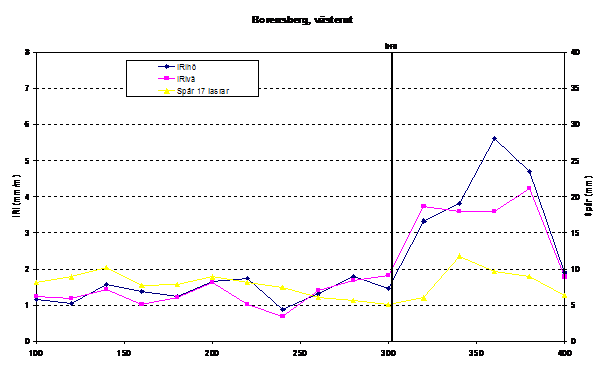
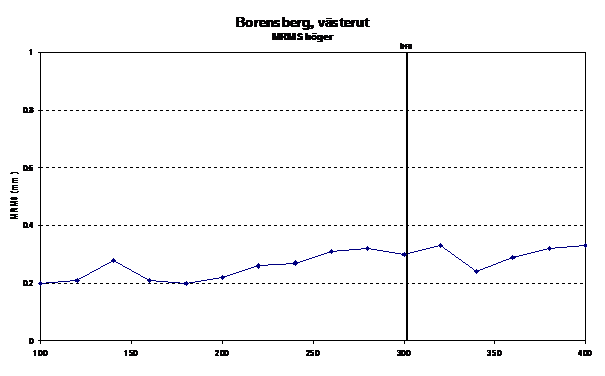
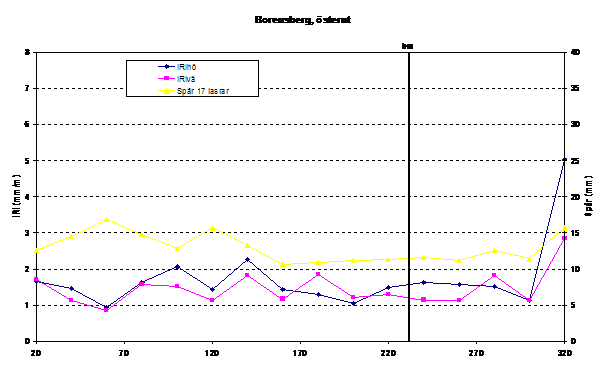
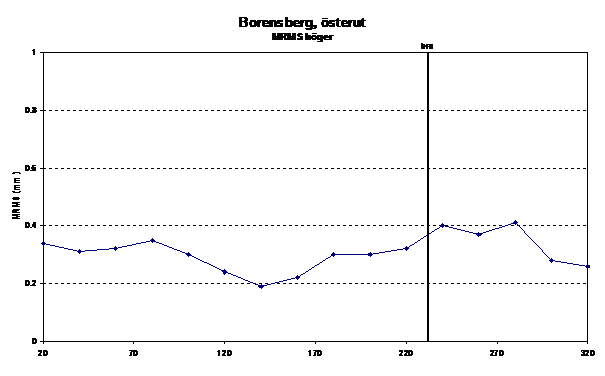
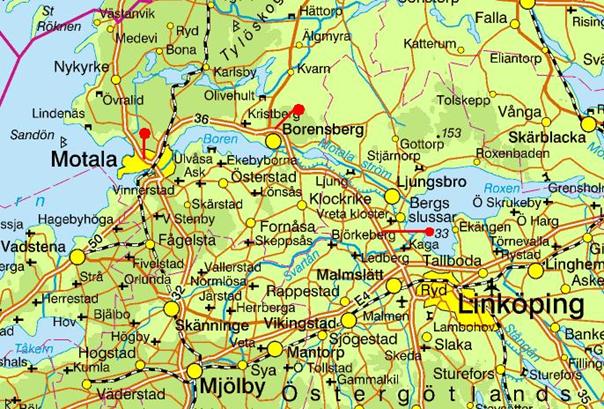
5.2.2 Borensberg
Bron ligger i Borensberg på riksväg 36 som går mellan Linköping och Motala.
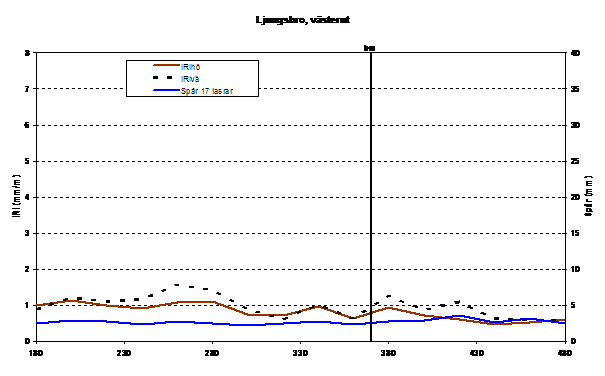
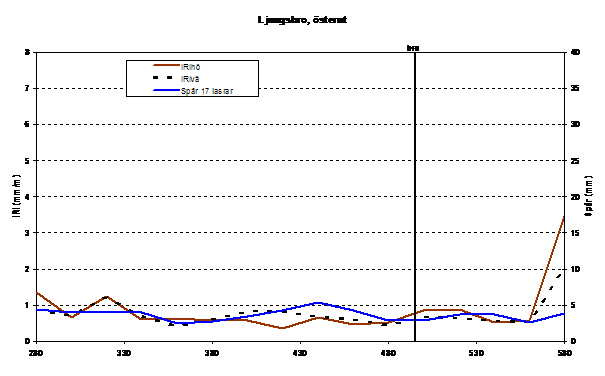
5.2.3 Ljungsbro
Testningarna på denna bro som ligger på riksväg 36, som mellan Linköping och Borensberg, har inte kunnat visa några definitiva resultat. På denna bro monterades två system för att kunna undersöka repeterbarhet mellan de olika mätsystemen.
Problem uppstod med avseende på glidande, ökande, laster som systemen rapporterade. Första orsaken till detta troddes vara att töjningsgivarna gled under belastning. Glidningen skedde mellan brickan som ligger som anliggning mot brobetongen och töjningsgivarens metalldelar. Vidare undersöktes eventuella brister i elsystemen samt en grundlig genomgång av övrig hårdvara.
När töjningsgivarna åtgärdats, genom slipning av givarnas anliggningsytor, samt vissa modifieringar utförts av elsystemen, genomfördes en ny testomgång. Vid detta tillfälle testades även användning av så kallad FAD, Free of Axle Detectors. FAD innebär att det inte finns några synliga installationer på vägbanan. Axeldetekteringen sker istället med hjälp av 4 extra töjningsgivare som monteras under bron. Detta visade sig ge, för axeldetekteringen, klara och tydliga signaler.
Dock kvarstod problemen med ökande laster under belastning. Slutsatsen som drogs var att det händer något underligt med bron, systemen rapporterar att bron, för samma belastning, töjs 2 gånger så mycket i en riktning.
En inspektion av bron gav inte heller några slutgiltiga svar på denna fråga. Eftersom en fortsatt utredning av brons egenskaper inte kunde inrymmas i detta projekt beslutades att de två system som använts vid Ljungsbro skulle testas i ett nytt likvärdigt testmontage på Borensbergsbron, se vidare under testomgång 2 nedan.
Mätplatsen utgår därmed ur försöksprogrammet.
5.3 Testomgång 2 – Borensberg
För att undersöka de problem som uppstod på mätplats Ljungsbro och reda ut eventuella brister i mätsystemen utfördes ett testmontage av ”Ljungsbrosystemen” på Borensbergsbron. Denna test gav vid handen att systemen fungerade som de skulle och de fenomen som uppstod på Ljungsbrobron inte kunde upprepas.
5.4 Övriga mätningar 2003
Eftersom testomgång 2 genomfördes beslöts att inga andra mätningar skulle genomföras innan testomgång 2 var färdiganalyserad. Detta drog ut på tiden så endast två ytterligare mätningar kunde genomföras. Båda dessa mätningar genomfördes på motorvägssektioner. Mätningarna genomfördes dels på riksväg 40 vid Landvetter samt dels på E4 vid Mjölby.
Vid dessa mätningar mättes således trafiken endast i en riktning. Denna mätning var samtidigt ett test för att konstatera om det skulle fungera med ”enkelriktad” trafik. Resultatet från denna test var mycket gott.
Vid Landvetter upptäcktes att om kalibrering genomförs under tidpunkter då temperaturen i bron ändras mycket hastigt inverkar detta mycket kraftigt på mätresultaten. I vårt fall ändrades temperaturen med cirka 8 grader Celsius under 3 timmar. Detta faktum påpekades för ZAG och CESTEL som under vinterperioden 2003/2004 genomförde omfattande tester i Slovenien under liknande förhållanden. Effekterna uppstod även där och ett lösningsförslag är under utarbetande. Dessa effekter går att justera i efterhand. Landvetter har ännu inte analyserats.
5.5 Slutsatser från 2003 års mätningar
SiWIM-systemen är mobila system och lämpar sig förnärvarande inte för längre tids mätningar på samma mätplats. En rekommendation är att mätperiodens längd maximeras till 14 dagar. Om längre mätperiod är önskvärd måste ytterligare kalibreringar göras. Dessutom kommer mängden data som samlas in att kräva att mätsystemet töms på data under pågående mätperiod.
Resultaten av mätningarna är repeterbara, detta konstaterades efter mätningarna under testomgång 2 i Borensberg.
Fordonsklassificeringen i systemen fungerar mycket väl.
Inga problem med att mäta och sedan analysera en ”enkelriktad” trafikström.
Kalibreringar skall inte, i dagsläget, genomföras då temperaturändringarna i konstruktionen är stora.
6 ANALYS 2002 – 2003
Ur de mätningar som genomförts på vägnätet kan en mängd faktorer utläsas. En standarduppsättning av analyser har därför tagits fram. Det är viktigt att understryka att dessa analyser inte är de enda som går att göra på materialet. En genomgripande statistisk analys av insamlad data har ännu inte genomförts på grund av den enormt stora mängd data som samlats in.
6.1 Bakgrund
Projektets idé är att samla in uppgifter om hur den tunga trafiken på vägnätet ser ut, speciellt då hur den är lastad. Intresse fanns om att för en utvald skara av mätplatser analysera hur stora eventuella överlaster var. Ur vägkonstruktionens synvinkel är axelbelastningarna intressanta, ur brokonstruktionens synvinkel är bruttovikten samt fordonets sidoplacering på bron viktigt. Det senare har inte kunnat genomföras eftersom det med befintliga axeldetektorer inte varit möjligt att få fram sidoläget. Resultaten från denna typ av analyser skulle kunna hjälpa till vid dimensionering av underhållsåtgärder och nybyggnad, både för broar och för vägar.
6.2 Analysmål
För att få en uppfattning om hur trafiken på mätplatsen såg ut beslutades att samtliga fordon skulle registreras. Utgående från dessa data skulle sedan de tunga fordonens vikt och axel-konfigurationer analyseras. Av speciellt intresse var förekomsten av överlaster samt dessa överlasters storlek.
Följande parametrar planerades att analysera:
- Axellastspektrum
- Alla tunga axlar redovisas i diagramform och tabellform, histogram, fördelning o.s.v.
- Axelkonfigurationsspektrum
- Exempelvis ”enkel boggie” ”dubbel boggie” o.s.v. redovisning i diagramform och tabellform, histogram, fördelning o.s.v.
- Bruttoviktsspektrum
- Passerade/mätta axlar analyseras fordonsvis för att ge en liknande beskrivning som i ovan.
- Axellasthastighet
- Analys av vilken hastighet respektive axelbelastning ”typiskt” har.
- Fordonstypsidentifikation
- Analys av vilka fordonstyper som utnyttjar vägen. Identifieras initialt enligt befintlig typfordonsdatabas som levereras med ”post processing”-programvaran
- Beräkning av antal standardaxlar per tungt fordon, ”B”, enligt kapitel C ATB VÄG 2003.
6.3 Resultat som presenteras
Denna rapport redovisar inte alla de ovanstående punkterna utan koncentrerar sig på att ge en bild av hur den tunga trafikens bruttovikter fördelades, dels ur tidsperspektiv dels ur viktsperspektiv. En mer fullödig resultatpresentation finns i bilagorna till denna rapport.
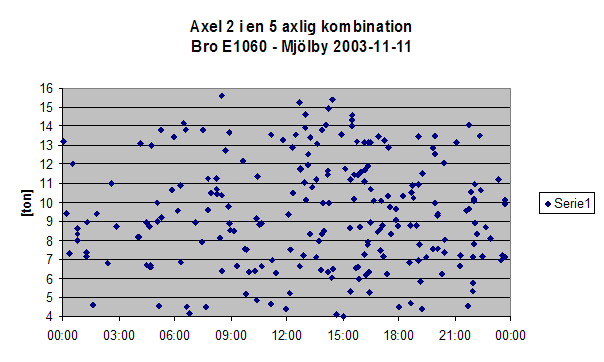
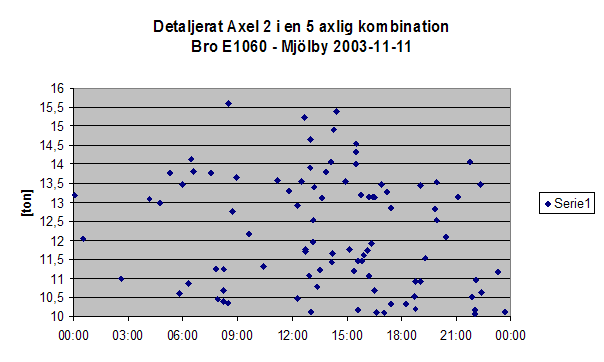
6.3.1 Kommentar om bruttoviktanalyserna ur tidsperspektiv
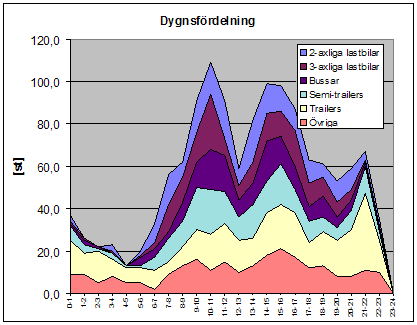
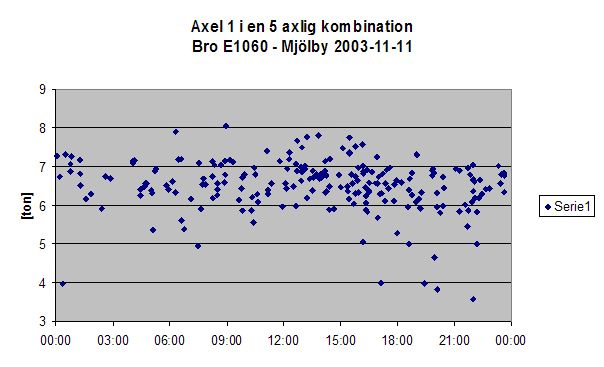
De tunga fordonens fördelning över dygnet presenteras i två olika former i denna rapport. Dels en uppritning av varje enskilt fordon i ett punktdiagram med tidsaxel samt dels ett histogram över antal fordon i respektive kategori som passerar varje timme. Trafiken redovisas dels i varje riktning samt dels sammanslaget för bägge riktningarna för mätplatserna. Se exempel nedan.
![]()
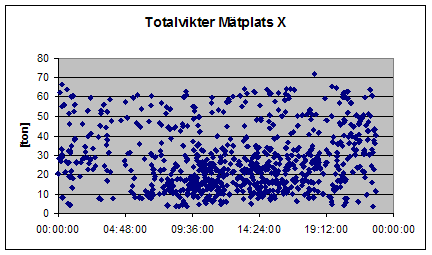
Figur 6‑1 Exempel på diagram över totalvikter, simulerad data.
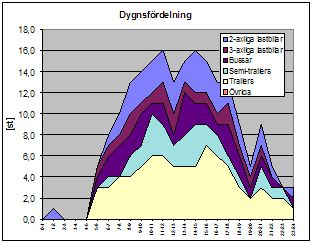
Figur 6‑2 Exempel på diagram över fördelning av den tunga trafiken över dygnet, simulerad data.
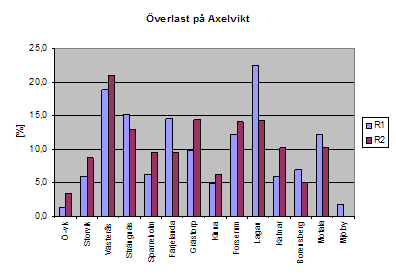
6.3.2 Kommentar om bruttoviktanalyserna ur viktperspektiv
Då det gäller vikterna har bruttovikterna analyserats ur tre olika lastperspektiv. Samma typ av punktdiagram som i avsnittet ovan används här. Detta diagram redovisar hur den totala viktfördelningen ser ut. Dessa data har analyserats med avseende på överlast på enskild axel eller bruttoviktsöverlast. Ur dessa data har sedan följande två olika analyser gjorts:
- Hur stor andel av fordonen med bruttovikt lika med eller över 35 ton är överlastade, antingen på enskild axel eller bruttovikt.
- Hur stor andel av fordonen med en bruttovikt under 35 ton är överlastade, antingen på enskild axel eller bruttovikt.
En analys av hur stor påverkan på vägkonstruktionen har gjorts. Då en dimensionering av vägkonstruktionen bygger på att man känner trafiken eller på ett korrekt sätt kan bedöma trafikens storlek är detta en viktig punkt. Sedan 1994 har antalet standardaxlar, 10 ton, per tungt fordon ansetts vara 1,3. Denna faktor påverkar direkt det förväntade antalet axlar som skall passera konstruktionen under dess livstid. En förändring i denna påverkar alltså antingen konstruktionens tjocklek med avseende på främst bundna lager eller den förväntade livslängden hos beläggningen.
Resultaten redovisas i stapeldiagramform.
6.3.3 Bortfall av mätdata
En del mätdata har inte kunnat användas på grund av problem med datakvaliteten. Detta kan bero på en mängd olika saker som exempelvis spårig och ojämn vägbana, mätsystemet stört av yttre faktorer såsom sabotage, påkörning etc.
I de fall då signalerna varit svåra att tyda, främst antalet axlar, har dessa eliminerats ur analysen eftersom det annars inte skulle ge en rättvisande bild av trafiken.
Då två fordon trafikerar bron exakt samtidigt kan inte heller analys genomföras eftersom töjningsgivarna i systemet inte kan känna av om fordonet passerar i riktning 1 eller riktning 2. Alla sådana händelser har eliminerats ur analyserna. Dessa händelser kallas för ”multiple presence” och kan antingen innebära att två tunga fordon varit på bron samtidigt eller att ett tungt och ett lätt fordon varit på bron samtidigt.
Då flera lätta fordon färdats med ett litet mellanrum på bron kan detta ha registrerats som ett tungt fordon. Denna händelse har också kontrollerats och i förekommande fall har dessa tagits bort ur analysen.
6.3.4 Bortfall av mätplatser
Av de 15 mätplatser som planerades under våren 2002 har totalt 10 analyserats.
6.4 Hastigheter som mätts upp
Följande tabell redovisar de hastigheter som mätts upp under mätningarna. Redovisade hastigheter utgör medelhastigheter, enheten är km/h. Station VSÖ1 respektive VVÄ1 redovisas inte eftersom dessa två stationer analyserats av ZAG i Slovenien där man inte undersökte denna aspekt.
|
Medelhastighet |
R1 |
R2 |
Skyltad |
|
|
Ö-Vik |
Tunga |
81,4 |
90,8 |
90 |
|
|
Lätta |
90,1 |
95,9 |
|
|
Storvik |
Tunga |
87,3 |
88,1 |
90 |
|
|
Lätta |
100,1 |
100,5 |
|
|
Västerås |
Tunga |
85,1 |
81,9 |
90 |
|
|
Lätta |
93,1 |
90,7 |
|
|
Sparreholm |
Tunga |
84,3 |
78,1 |
90 |
|
|
Lätta |
91,1 |
87,9 |
|
|
Strängnäs |
Tunga |
63,4 |
62,6 |
70 |
|
|
Lätta |
66,2 |
66,7 |
|
|
Lagan |
Tunga |
84,8 |
87,3 |
110 |
|
|
Lätta |
97,5 |
104,3 |
|
|
Oskarshamn |
Tunga |
78,5 |
79,1 |
90 |
|
|
Lätta |
76,6 |
76,9 |
|
|
Grästorp |
Tunga |
57,5 |
56,0 |
50 |
|
|
Lätta |
54,9 |
52,8 |
|
6.5 Medelvikter tunga fordon
Följande tabell redovisar ett urval av medelbruttovikterna som mätts upp, enheten är ton.
|
|
R1 |
R2 |
|
Ö-Vik |
17,4 |
18,9 |
|
Storvik |
22,3 |
26,1 |
|
Västerås |
35,6 |
38,2 |
|
Sparreholm |
27,2 |
26,2 |
|
Strängnäs |
18,3 |
19,6 |
|
Lagan |
17,7 |
23,7 |
|
Oskarshamn |
32,2 |
29,6 |
|
Grästorp |
25,3 |
31,2 |
6.6 Resultat i kortform
I detta avsnitt redovisas resultaten som rör mätning av överlaster. Här redovisas endast den delen av analysen som behandlar överlast. I tabellerna representerar R1 respektive R2 de olika mätriktningarna. R1=Riktning 1, R2=Riktning 2.
Övervikt på bruttovikt inbegriper fordon vars överlast kommer av överstigande av bruttoviktsgräns, detta innebär att om enstaka axel varit överlastad på ett sådant fordon så kommer detta resultat inte att inräknas som axelövervikt.
Resultaten för R2 i Västerås är tveksamma eftersom de bygger på mycket få
fordon.
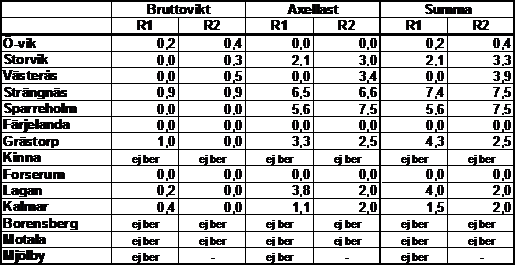
6.6.1 Överlast, alla tunga fordon
I detta avsnitt redovisas hur andelen av samtliga tunga fordon och hur överlasterna fördelas mellan bruttovikt- respektive axellastövervikt.

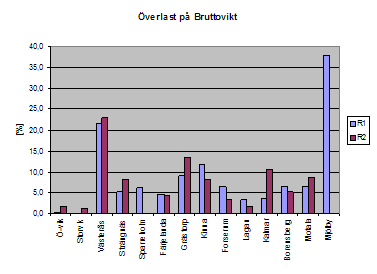
6.6.2 Överlast, tunga fordon med bruttovikt lika med eller större än 35 ton
De fordon som är lastade har oftast en bruttovikt som överstiger 35 ton. I denna analys ingår således inte fordon med 2 eller 3 axlar. Dessa fordon behandlas i avsnitt 6.6.3. Här presenteras andelen av de fordon vars bruttovikt är lika med eller större än 35 ton.

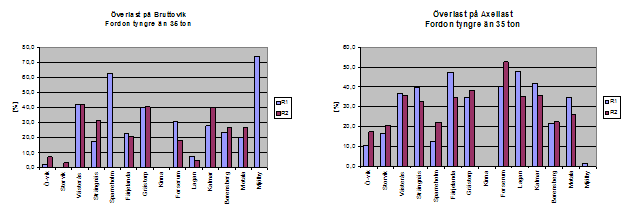
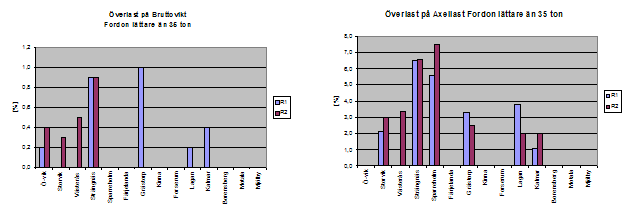
6.6.3 Överlast, fordon med bruttovikt mindre än 35 ton
Här presenteras andelen av de fordon vars bruttovikt understiger 35 ton.
6.7 Standardaxlar per tungt fordon
Antalet standardaxlar per tungt fordon är en avgörande parameter vid dimensionering av vägkonstruktionen. Historiskt, sedan 1994, har faktorn 1,3 använts vid beräkning av ekvivalent antal standardaxlar. Faktorn kallas för B-faktorn i ATB VÄG 2003, se Formel 1 nedan.
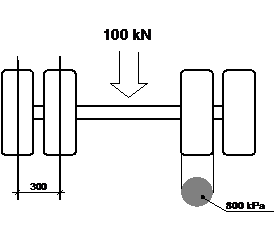
Figur 6‑3 Typskiss över en standardaxel enligt ATB VÄG 2003.

Formel 1 Ekvationen
som används för att beräkna ekvivalent antal standardaxlar.
|
ÅDTk |
Trafikflödet per dygn i ett körfält [st] |
|
A |
Andel tung trafik [%] |
|
B |
Antal Standardaxlar per tungt fordon |
|
n |
Dimensioneringsperiod [år] (vanligtvis 20 år) |
|
k |
Trafikökning [%] |
Det är i detta sammanhang mycket viktigt att poängtera att B-faktorn och frekvensen av överlast inte har med varandra att göra. Ett fordon som är lagligt lastat kan mycket väl generera höga B-faktorer.
En vägkropp dimensioneras utefter det förväntade
antalet standardaxlar som kommer att passera under den tänkta
dimensioneringsperioden. Detta resultat kallas ekvivalent antal standardaxlar, Nekv. Nekv
beräknas som produkten mellan årsdygnstrafiken, andel tung trafik, den ökning
som förväntas ske av tung trafik samt faktorn B. Diagram 6‑1 och Diagram
6‑2 beskriver faktorn B’s
påverkan på resultatet av en sådan beräkning. Y-axeln i diagrammen ger Nekv, d.v.s. den trafikmängd
som konstruktionen måste tåla för att inte nedbrytningstakten skall bli högre
än den avsedda.

Diagram 6‑1 B-faktorns påverkan på ekvivalent antal standardaxlar Nekv,
låga trafikvolymer

Diagram 6‑2 B-faktorns påverkan på ekvivalent antal standardaxlar Nekv,
höga trafikvolymer
Linjerna i diagrammen ovan respresenterar olika mängd
standardaxlar under den tänkta dimensioneringsperioden för vägkonstruktionen. Staplarna
till höger i diagrammen representerar trafikklassens omfattning.
Nedanstående Diagram
6‑3, visar hur tjockleken på en vägkonstruktion beror av
värdet på
faktorn B. En ökning av faktorn B innebär således en direkt ökning av
vägkroppens sammanlagda tjocklek. Denna tjockleksökning påverkar direkt
tjockleken hos de bundna lagren. Som exempel kan nämnas att om man vid
dimensioneringen av vägkroppen antagit att värdet på faktorn B är 1,0 för aktuell vägsträcka men
istället visar sig vara 3,0 så måste beläggningstjockleken ökas från 120 mm
till 160 mm alltså en skillnad på 40 mm, vilket motsvarar hela tjockleken hos
ett bitumenbundet slitlager enligt ATB VÄG.
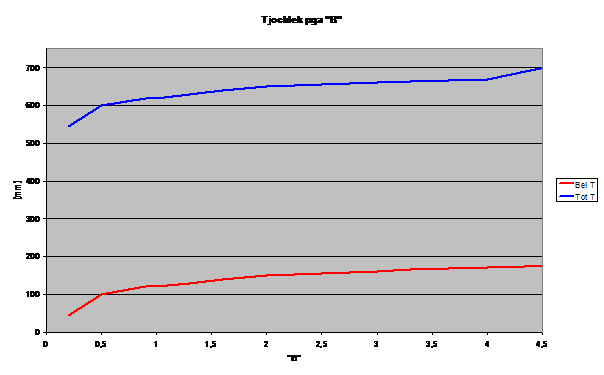
Diagram 6‑3 Hur vägkonstruktionens tjocklek beror av faktorn B.
Diagram
6‑1 respektive Diagram
6‑2 skall utläsas som att man ursprungligen dimensionerar
vägen med ett visst värde på faktorn B
så fås kravet på vägkonstruktionen på y-axeln via en vald ”trafikmängdslinje”.
Om nu värdet på faktorn B ökas till
det dubbla kommer därför kravet på vägkonstruktionen att öka.
Exempel: Diagram 6-2
används vi antar att vi har en faktor B = 1,5 för en viss väg.
Trafikmängdslinjen väljs till 9-19 milj standardaxlar. Vi får då ”kravet” 23
milj axlar för konstruktionen. Vid mätning visar det sig att faktorn B egentligen
har ett värde på B=3,75 då blir kravet istället ca 58
milj standardaxlar. Detta motsvarar 40 mm extra bundet bärlager samt ca 5 cm
extra skyddslager för att uppfylla de bärighetskrav som ställs i ATB VÄG.
Om man istället betraktar ett enskilt objekt som redan byggts under antagandet att B=1,3 och sedan låter B variera inom de gränser som mätts upp under projektet kommer man fram till följande bild.
I nedanstående Diagram 6‑4 varierar ”förväntad teknisk livslängd” eller dimensioneringsperiod på y-axeln medan B varierar på x-axeln
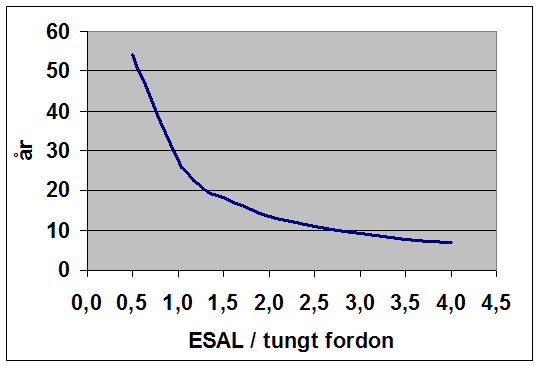
Diagram 6‑4 Variation i livslängd för ett exempel.
Dessa data är därför mycket värdefulla ur vägdimensioneringssynpunkt. I nedanstående Tabell 6.7‑1 redovisas uppmätta och beräknade B-faktorer för respektive mätplats.
Tabell 6.7‑1 Beräknade antal standardaxlar per tungt fordon, faktorn B enligt ATB VÄG.
|
Standardaxlar per tungt fordon |
||
|
|
Riktning
1 |
Riktning
2 |
|
Örnsköldsvik |
0,23 |
0,41 |
|
Storvik |
1,16 |
1,56 |
|
Västerås |
3,39 |
3,87 |
|
Strängnäs |
1,82 |
2,32 |
|
Sparreholm |
0,55 |
0,71 |
|
Forserum |
0,97 |
0,91 |
|
Lagan |
2,68 |
2,21 |
|
Oskarshamn |
1,37 |
2,29 |
|
E6 |
0,89 |
0,93 |
|
Grästorp |
1,87 |
2,4 |
|
Kinna |
1,92 |
1,85 |
|
Borensberg |
1,34 |
1,45 |
|
Motala |
1,04 |
0,91 |
|
Mjölby |
3,40 |
ej mätt |
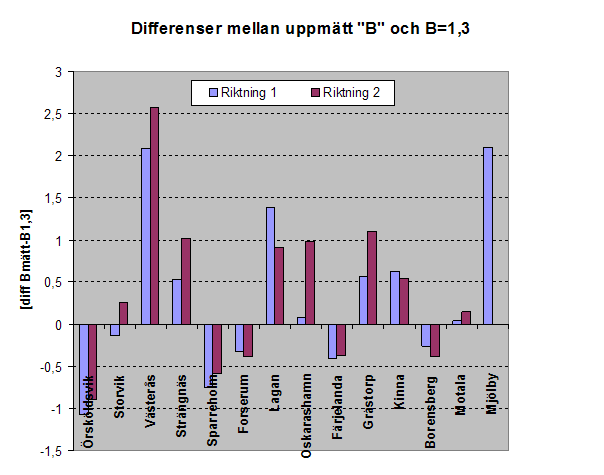
Diagram 6‑5 Differensen mellan mätta och analyserade B-faktorn mot B=1,3.
6.8 Analysernas genomförande
6.8.1 Allmänna ställningstaganden inför analyserna
På grund av den stora mängd data som samlats togs beslutet i ett första läge, 2002, att minst en dag per mätstation skulle analyseras. Valet föll på en tisdag under mätperioden. Vidare beslutades att en relativt tuff linje skulle hållas med avseende på eventuella tveksamheter från mätningarna. Detta har gett vid handen att en hel del data, främst från Västerås har skrotats på grund av otydliga och svårtolkade mätdata. Vidare bestämdes att om man vid analysen var tvungen att justera axelbelastningar så skulle dessa justeringar inte medföra en för hög totalvikt. Vid tveksamheter har dessa fordon eliminerats ur analyserna.
Under 2003 har dessa analyser reviderats och utökats så att minst 5 dagar per mätstation, förutom Storvik och Örnsköldsvik, har kontrollerats och analyserats.
6.8.2 Analysprogrammet, SiWIM-D
Som start på varje analys skedde en kontroll med avseende på extrema mätvärden eller tolkningar av mätvärden. Detta gjordes genom en kontroll med avseende på följande kriterier:
- Enskild axel tyngre än 13 ton.
- Bruttovikten på fordonet överstiger 65 ton.
- Fordonet kan inte klassificeras.
- Flera fordon på bron samtidigt.
- Den automatiska beräkningen av mätvärden inte bra enligt ett programinternt kvalitetsindex.
Anledningen till kontrollerna är bland annat att beroende på hur väl de pnuematiska axeldetektorerna lyckats med axeldetekteringen så klarar analysprogrammet inte av att tolka mätningen korrekt. Detta kan få till följd att programmet ”missar” en eller flera axlar på ett fordon. I dessa fall har en manuell behandling av dessa skett vilket i klartext betyder att operatören lägger till extra axlar till mätningen, eller drar ifrån. Om axlar saknas eller extra axlar tolkats in kan heller inte fordonen klassificeras på ett korrekt sätt.
Även vikterna kan ibland bli feltolkade, då detta skett har justering av vikterna utförts. I dessa fall har instruktionen till operatören varit att hellre lägga på för lite last eller dra ifrån för mycket så att mätningarna inte skall visa onödigt tunga axelkonfigurationer och därmed generera ett överlastat fordon.
Om flera fordon varit samtidigt på bron genereras för stor vikt till analysresultatet. Man kan skilja på två fall: två tunga fordon på bron samt ett tungt fordon och en personbil. Vi har valt att eliminera alla förekomster av flera fordon på bron för att undvika eventuella feltolkningar av axelbelastningar.
Ovanstående kontrollpunkter kan givetvis förändras och modifieras efter önskemål. Programvaran kan om man så vill ställas in för att endast kontrollera fordon av en viss typ etc.
6.8.3 Efterbearbetning av resultaten
Eftersom analysprogrammet har begränsade presentationsmöjligheter har resultaten från analyserna exporterats till Excel för presentation. Ett program för att ta hand om analysfilerna har skapats inom projektets ram. Detta program utnyttjar sedan en mall som skapats i Excel så att samtliga stationer presenteras på samma sätt. Resultatsammanställningen i denna rapports bilagor kommer från dessa Excelanalyser.
6.9 Resultat
Resultaten som presenteras i detta avsnitt bygger på en analyserad mätvecka per mätplats, utom i två fall.
I föreliggande avsnitt redovisas endast en mätstation. Övriga mätstationers data finns redovisade i avsnittet 11 B.
6.9.1 Resultat Region Mälardalen, Strängnäs
Figur 6‑4 Bruttoviktsföredelning, resultat från ett dygn.
![]()

Figur 6‑5 Histogram över fördelning, resultat från ett dygn.
Överlaster alla fordon, resultat från ett dygn.

Överlaster fordon lastade lika med eller mer än 35 ton, resultat från ett dygn.

Överlaster fordon lastade mindre än 35 ton, resultat från ett dygn.

Antalet standardaxlar per tungt fordon
Riktning 1 1,82
Riktning 2 2,32
Kommentar:
GVW – Gross Vehicle Weight – Brottovikt
GVW eller axellast: Detta är summan av de två vänstra kolumnerna.
Överlast med avseende på bruttovikt (GVW) innebär att maximalt tillåten bruttovikt för fordonet överskridits. Detta kan ske antingen genom att:
1 - endast bruttovikten överskrids, eller
2 - bruttovikt och axellasten för en eller flera axlar överskrids.
Då punkt 2 ovan inträffar räknas detta ej in i ”Endast axellast – kolumnen”, det vill säga en överlastat axel räknas endast en gång – antingen i ”Endast GVW” eller i ”Endast Axellast”.
Resultaten redovisar endast ett dygns mätning.
6.10 Utveckling av analyserna
De analyser som genomförts under projekttiden är bara en del av de analyser som går att genomföra på materialet. Under projektets gång hölls analyserna till en strikt nivå som bestämdes tidigt. Resultaten redovisades som i föregående avsnitt och projektet nöjde sig med detta. En lista på ytterligare analysformer, detaljer och behov har upprättats. Listan kommer att kompletteras under det fortsatta projektets gång.
- Enskilda fordonstypers laster.
- ”Total belastning” under dygnet.
- ”Total belastning” under mätperioden.
- Enskilda axlars vikter.
- Tidsintervall mellan belastningar.
- Etc
Exempel på några av dessa har upprättats och redovisas i följande avsnitt.
6.10.1 Enskilda fordonstypers laster, exempel
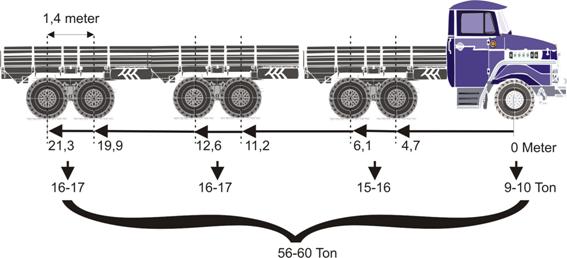
Detta bygger på data från Mjölby 2003 under ett mätdygn i november.

Figur 6.10‑1 Fordonstyp som analyserats, No 113
i Vehicle_classes.conf.
|
Mjölby
|
|
|
|
Antal fordon |
225 |
st |
|
Total vikt Framaxlar |
1465 |
ton |
|
Total vikt Drivaxlar |
2105 |
ton |
|
Total vikt Trippel-boggie |
3500 |
ton |
|
Medelvikt Framaxlar |
6,5 |
ton |
|
Medelvikt Drivaxlar |
9,4 |
ton |
|
Medelvikt Trippel-boggie |
15,6 |
ton |
|
Total
passerad vikt Norrgående |
7070 |
ton |
Tabell 6‑2 Fordonsanalys, 5-axlig, Mjölby, avser endast fordonstyp 113

6.10.2 Exempel på redovisningar av total passerad vikt
Data baseras på tre mätstationer från mätningarna som genomfördes under 2002.
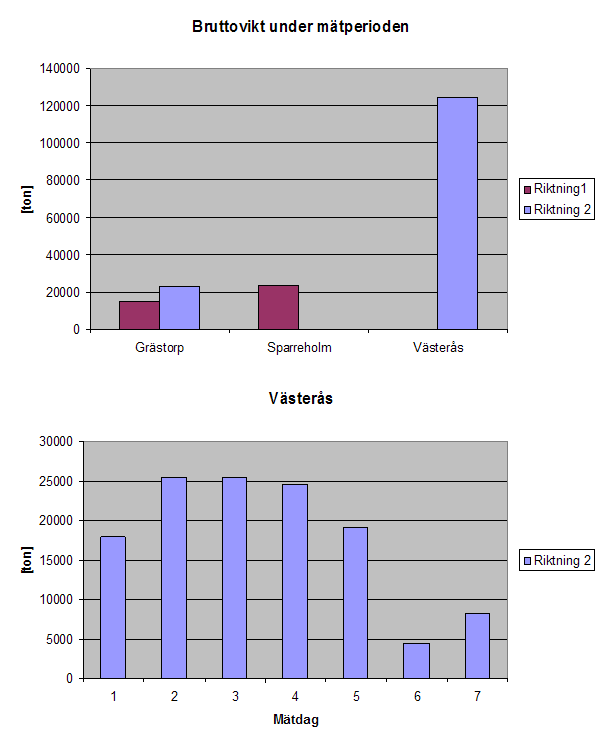
Det översta diagrammet representerar total passerad vikt under en hel analysperiod. Det understa diagrammet redovisar total passerad vikt uppdelat per mätdag.
7 KALIBRERINGSBIL OCH VÄGYTANS EGENSKAPER VID MÄTPLATSERNA
7.1 Kalibreringsbil
För att kalibrera och normera utrustningen då den är monterad på olika broar behövs en mätning med kända laster och axelkombinationer. Därför har några tunga fordonskombinationer hyrts in för detta ändamål. Så långt möjligt har samma fordon och förare anlitats för alla provplatser och tillfällen.
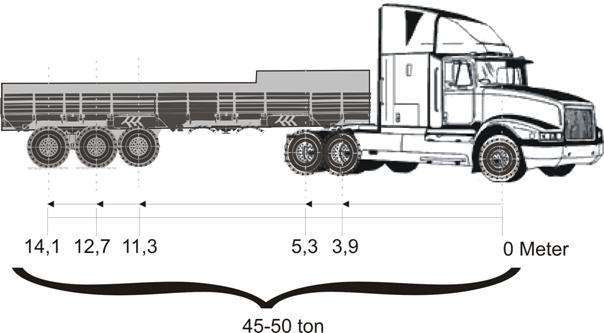
Inför varje nyetablering av provplats har kalibreringsbil/ar använts. Kontrollvägning har skett vid en och samma vägningsplats, Ringeby trafikplats, Norrköping. Förankrade vikter (järnbalkar) fördelade på dragbil och släp har använts för att åstadkomma så stor belastning som möjligt. Den första kalibreringsbilen består av en tre-axlad dragbil och ett fyraxlat släp, se Figur 7‑1. Typiskt låg lastnivån vid kalibreringarna på ungefär 59 ton.
Figur 7‑1 Sjuaxliga kalibreringsbilen
Den andra kalibreringsbilen består av en sexaxlig trailer kombination, se Figur 7‑2. Detta fordon lastades till ca 46 ton vid varje kalibrerings- och kontrolltillfälle.
Några viktiga faktorer som kan påpekas då kalibreringsbilen används är att det bör finns lämpliga vändplatser i båda riktningarna inte allt för långt från testbron. Ett så stort och tungt fordon som kalibreringsbilen utgör innebär att det krävs en rejäl vändplats.
För att uppnå så stor vikt (belastning) som möjligt har s.k. ”dummy”-vikter i form av järnskrot använts. Det är viktigt att lasten är väl förankrad på bilen och inte förflyttar sig under kalibreringsproceduren.
Slutligen kan det påpekas att körinstruktioner till föraren behövs. Hur ska han placera bilen lateralt då det finns spår? Om man kör i spåren kan slangarna komma i svängning och ge falska pulser. En regel är att hålla samma laterala position vid samtliga passager och att provplatsen är vald så inga spår finns.
Figur 7‑2 Den sex axliga kalibreringsbilen
7.2 Utförda jämnhetsmätningar
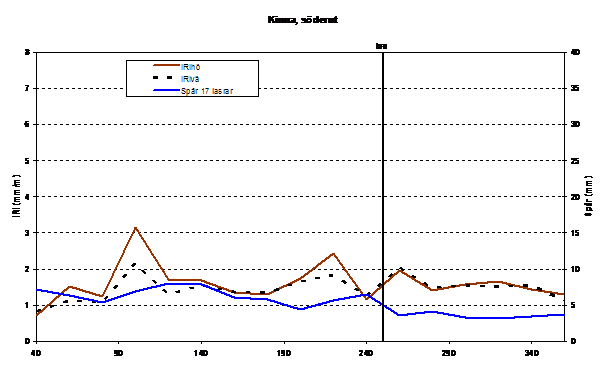
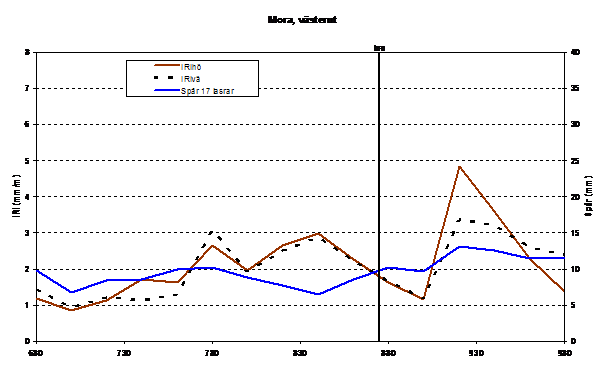
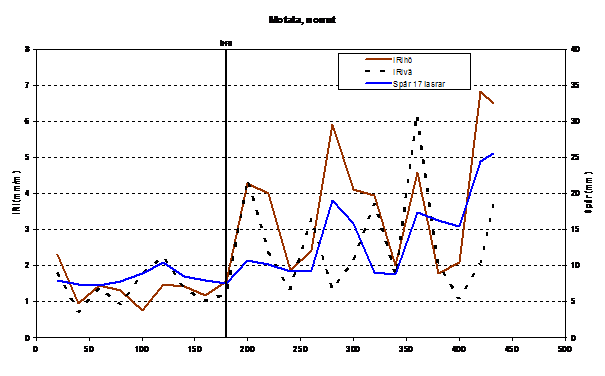
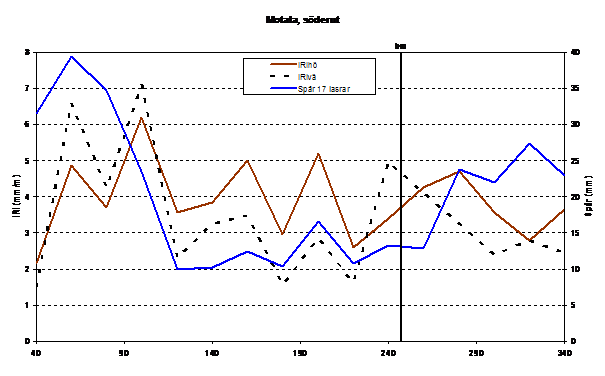
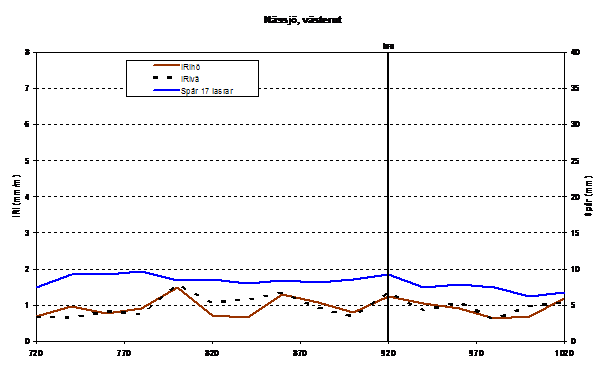
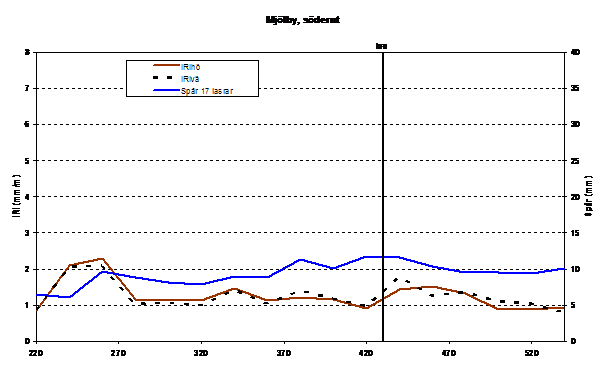
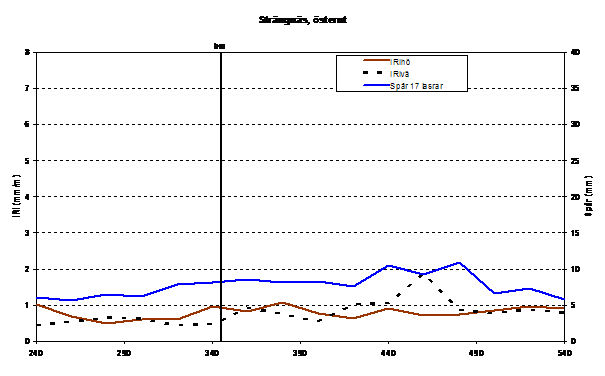
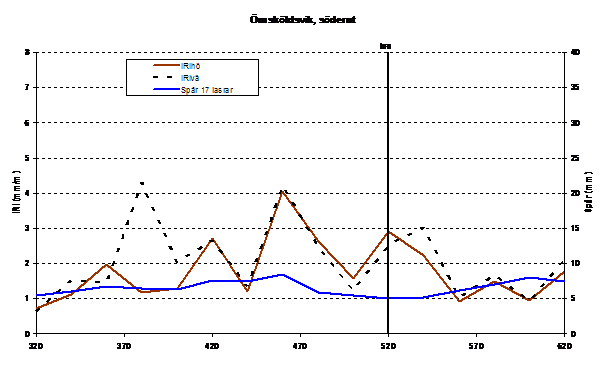
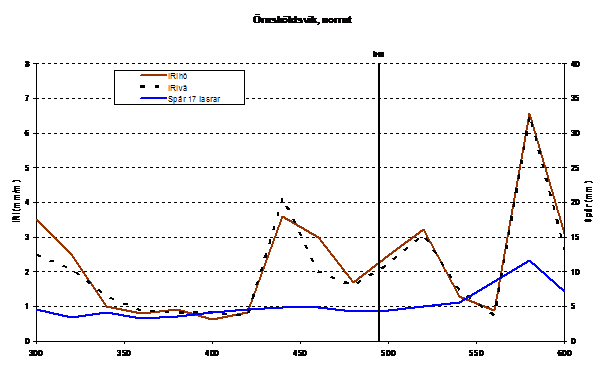
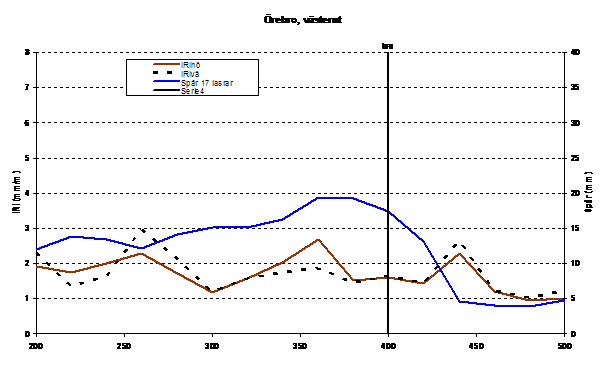
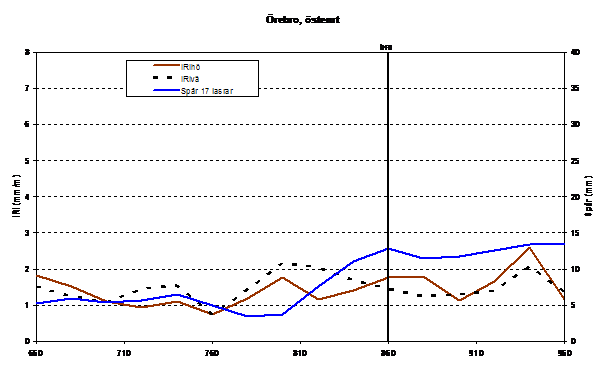
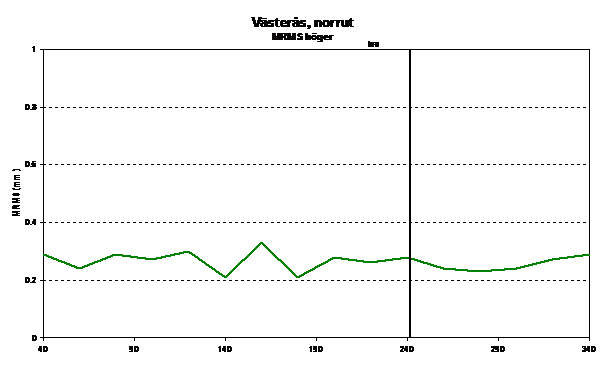
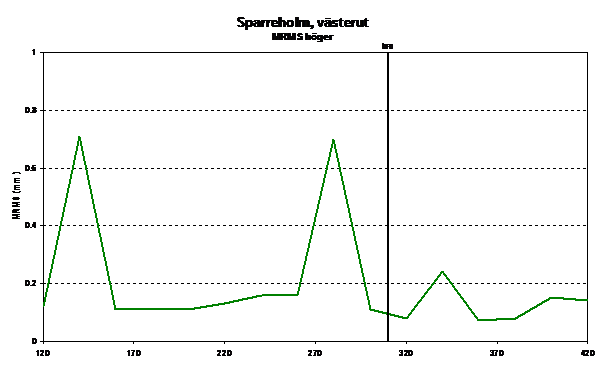
Som mätdata finns längsprofiler inklusive jämnhetsmått (IRI och Megatextur), två för varje mätdrag. Längsprofilerna är samplade med 5 cm täthet till skillnad mot ordinarie vägnätsmätningar som använder 10 cm. Vidare finns tvärprofiler inklusive spårdjupsmått samt tvärfall och kurvatur.
Ett mätförfarande valdes och användes vid samtliga mätningar. Förfarandet innebar att ”täcka” och samla in data från hela vägbredden som möjligt. Detta innebar ett förfarande att mäta tvärprofil samt längsprofil i båda hjulspåren med en lateral placering enligt normal vägytemätning, 1h och 2h i Figur 7‑3. Mätningen med denna placering upprepas en gång. Därefter görs en mätning där mätbilen placeras så långt som möjligt tillhöger, läge 2h och 2v i Figur 7‑3 . Samma procedur utförs med en placering lateralt så långt till vänster som möjligt, läge 3h och 3v enligt Figur 7‑1. Enligt detta förfarande finns nu sex lateralt olika placerade längsprofiler som en ”fullcar” modell kan utnyttja för analys av en simulerad axelkombinations dynamiska påverkan på bron.
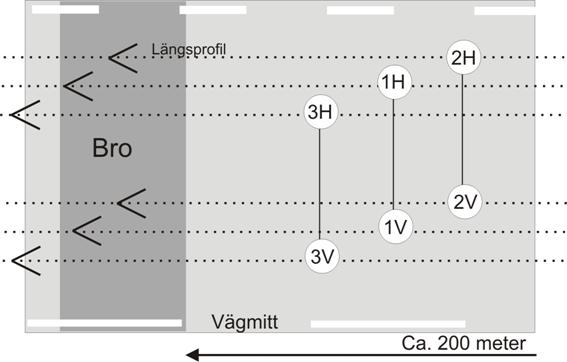
Figur 7‑3 Lateral lägesplacering för längsprofilmätning, streckade linjer anger läge för mätt profil. Vägen är sedd uppifrån och färdriktning åt vänster. (ej skalenlig)
7.3 Slutsatser från jämnhetsmätningarna
För att genomföra noggranna mätningar av tunga axlars last då dessa rullar i fart måste ett antal krav på provplatsen uppfyllas. Information och förslag till sådana kan återfinnas i rapporter från de två Europeiska projekten WAVE ”Weighing in motion of Axles and Vehicles for Europé” samt COST 323, ”Weigh-in-Motion of Road Vehicles”. Vid mätning av fordon och axelvikter i fart är det välkänt att dynamiska påkänningar från fordonen som ska vägas kan påverka resultatet. Detta sker på grund av att den dynamiska belastningen, som härrör från bilens vertikalrörelse och som uppkommer från vägens ojämnheter tillförs till den statiska lasten. Vid mätning på broar kan man anta att detta är ett påtagligt problem på grund av övergången från vanlig vägkonstruktion till bro ofta kan innehålla ojämnheter eller sättningar . Under försökens genomförande har det visat sig att också tvärprofilen är en viktig faktor vid val av mätplats. De slangar som används, för att detektera trafiken och klassificera fordonstyp kan lossna eller skadas, t.ex. slits de sönder då ett fordon bromsar med hjulen på slangen men de lossnar också på grund av stora spårdjup. Typiska problem som då uppstår är att t.ex. ”falska” pulser kan åstadkommas vilket medför att klassificeringen av fordonstyp blir fel.
Vid kalibrering av viktmätningen görs överfarter med kända statiska laster (kalibreringsbil). Man tar då vid fastställande av kalibreringsfaktorer hänsyn till de dynamiska effekter (tillskott) som uppstår, när kalibreringsbilen passerar. Olika fordon har olika dynamiska egenskaper så att ju flera typer av kalibreringsbilar som används desto säkrare blir kaliberingsfaktorerna.
Slutsatsen är att det behövs ett kriterium för ojämnheter både i vägens längs- och tvärriktning Resultaten är sammanställda i ”Appendix, Data från jämnhetsmätningar”.
Någon detaljerad analys av jämnhetsdata och jämförelse med axellastdata har inte gjorts ännu. Flera observationer har dock gjorts som inneburit byte av mätplats, både vad gäller för stor spår som för stora längsgående ojämnheter. Att ojämnheterna i längsled påverkar lastmätningarna är helt tydligt. Ett exempel är den först valda provplatsen vid Örnsköldsvik som fick ersättas med en ny på grund av en kraftig ojämnhet före provplatsen. Vid Färgelanda byttes provplats på grund av för stort spårdjup. Man kan också konstatera att spårdjupet har en stor påverkan på fordonens val av sidoläge när de passeras bron hos både kalibreringsfordon och den tunga trafiken. Olika sidolägen för fordonen påverkar axellastmätningen. Man bör alltså kontrollera spårbildningen både på och före bron samtidigt med fordonens val av sidoläge. Om man vill utnyttja högre noggrannhet i axellastmätningarna bör man avgöra lämpligheten hos provplatsen via mätning av ojämnheter.
I nuläget med den
relativt låga noggrannheten på lastmätningen (~5 %) räcker troligen en visuell
bedömning. Men i ett läge då man vill utnyttja högre noggrannhet i
axellastmätningen bör man kontrollera jämnheten via mätning. Genom att
fortsätta samla in data under nästa testperiod bör man få ett tillräckligt bra
material att sätta gränsvärden för vad som är en lämplig provplats.
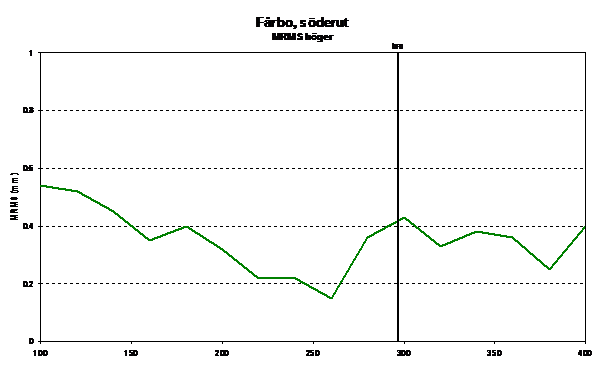
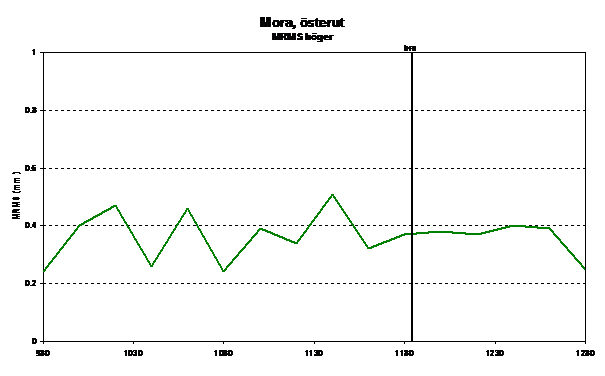
7.4 Beskrivning av längsprofil, IRI, megatextur och spårdjup
7.4.1 Längsprofil
Längsprofilen utgör grunden för många av de mått som beskriver vägens ojämnheter i längsled. Längsprofilen mäts i praktiken kontinuerligt och presenteras normalt som vägens höjdskillnad för presentationslängden 100 mm. Längsprofilen utgör inte den ”sanna” vägprofilen utan beskriver ojämnheter inom våglängdsintervallet 0,5 – 100 m.
7.4.2 IRI-International Roughness Index
Längsprofilen är grunden för beräkning av exempelvis IRI. IRI är ett standardiserat mått för ojämnheter i längsled. IRI kan beskrivas som en sammanvägning av de viktigaste ojämnheterna som påverkar trafikanten vid körning på väg. Denna sammanvägning kan egentligen tecknas som en effektmodell, d.v.s. har vi lågt IRI-värde så är effekterna på trafikanten låga och vice versa. Måttet beräknas utifrån vägens längsprofil. Förutom att verka som en ”effektmodell” så används måttet för att kvantifiera vägens status och nedbrytning utifrån ett väghållarperspektiv. IRI-måttet bestäms normalt i mätfordonets högra hjulspår, därav benämningen IRI höger. Den med tecken summerade vertikala rörelsen hos hjulet och chassiet då modellen åker med 80 km/h fart utmed längsprofilen utgör IRI-värdet, se Figur 7‑4.
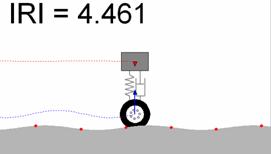
Figur
7‑4 Enhjulsmodell för bestämning av IRI
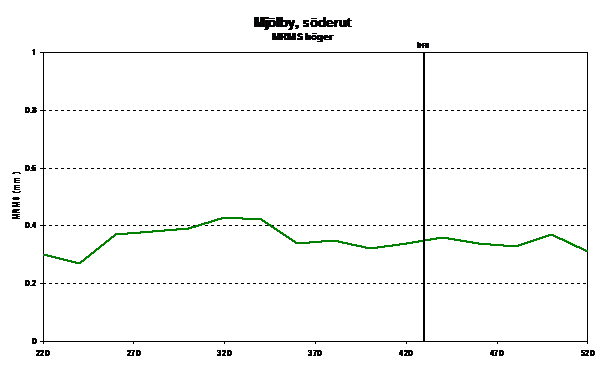
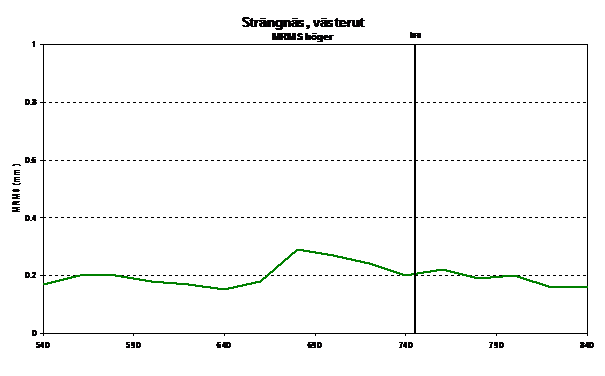
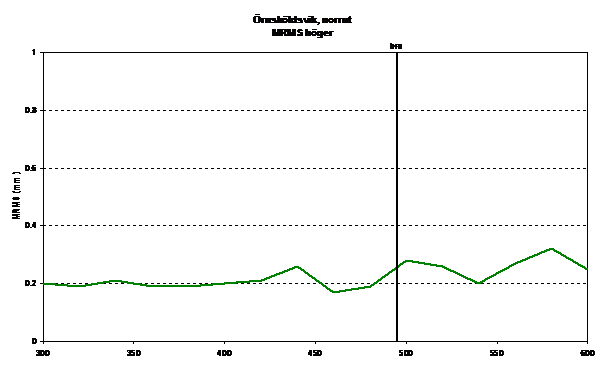
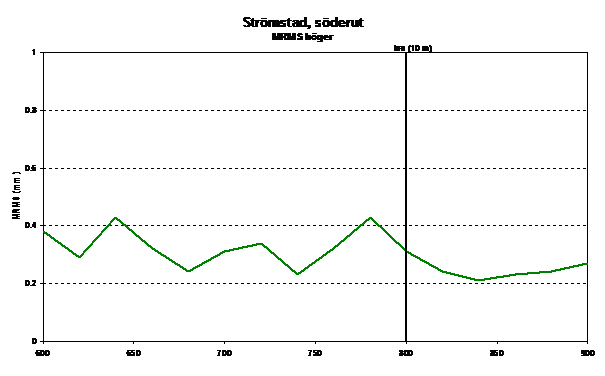
7.4.3 Megatextur
Megatextur definieras av ojämnheter som har våglängder mellan 0.05 och 0.5 meter. Detta betyder att potthål, skarvar, kanter och liknande kan upptäcks med måttet. För närvarande uttrycks det i form av ett rms-värde. Rms står för Root Mean Square och kan i detta sammanhang beskrivas som vägprofilens energiinnehåll inom ett våglängdsintervall 0.05 till 0.5 meter. Allmänt kan man säga att förekomst av megatextur enbart har negativa effekter och är därmed helt oönskat.
7.4.4 Spårdjup
Spårdjup max är medelvärdet över 20 m för det maximala spårdjupet från var och en av 200 st. tvärprofiler, där varje tvärprofil är mätt i 17 punkter. Måttet är en kvantifiering av vägens hjulspår som uppstått genom trafikarbetet och medfört slitage eller deformation på vägen. Spårdjupet definieras och beräknas enligt den s.k. trådprincipen. Trådprincipen innebär att en tänkt tråd spänns över tvärprofilen och den största vinkelräta avvikelsen utgör spårdjup max, se Figur 7‑5.

Figur 7‑5 Spårdjup beräknat enligt trådprincipen (S5=spårdjup max).
7.5 Kontroll av påverkan från temperaturvariationer i bron
För att få ett svar på om temperaturen och dess påverkan på brokonstruktionen påverkar resultaten av lastmätningen gjordes en mindre undersökning. Utrustning för mätning av temperaturen monterades på två av försöksbroarna, vid Ljungsbro och Borensberg. En givare placerades hängande under bron för att mäta lufttemperaturen. En annan givare placerades klistrad under bron mot betongytan för att mäta brokroppens temperatur. Temperaturdata samlades sedan in med ett värde för var femte minut under ca en vecka per bro samtidigt som lastmätningar pågick, se ”Appendix Data från temperaturmätningar”. Resultaten från dessa temperaturmätningar visar ingen särskild påverkan på viktmätningarna. (Data från Ljungsbro gick ej att analysera se avsnitt 5.2.3)
7.6 Kontroll av axelöverfarter mha videoanalys
För att kontrollera
systemets förmåga att avgöra antal axelöverfarter och bestämning av fordonstyp
gjordes videofilmning vid två broar, Borensberg samt Ljungsbro. Från
videofilmen kunde utläsas antal axlar som passerade samt om flera fordon befann
sig på bron samtidigt. Detta jämfördes sedan med resultatet från SiWIM-systemet.
Filmningen gjordes med en digitalvideo placerad på ett stativ så att hjulen
från passerande fordon kunde observeras. Resultaten visar att det inte fanns
några olikheter mellan videoanalys och slangmatningen vad
gäller axeldetekteringen.
7.7 Resultat av kontrollmätningar i samarbete med polisen
Nedanstående tabell redovisar resultaten från de kontrollmätningar som genomfördes vid respektive mätplats under 2002 års mätningar.
|
Poliskontrollmätningar |
||||
|
2002 |
|
|
|
|
|
Fordon |
Polisvåg |
WIM |
Differens |
Differens |
|
|
[ton] |
[ton] |
[ton] |
|
|
1 |
33,79 |
33,85 |
-0,06 |
0,2% |
|
2 |
37,92 |
38,33 |
-0,41 |
1,1% |
|
3 |
36,94 |
38,73 |
-1,79 |
4,6% |
|
4 |
59,35 |
58,80 |
0,55 |
0,9% |
|
5 |
63,00 |
64,59 |
-1,59 |
2,5% |
|
6 |
68,27 |
67,46 |
0,81 |
1,2% |
|
7 |
61,18 |
62,38 |
-1,20 |
1,9% |
|
8 |
59,14 |
57,65 |
1,49 |
2,6% |
|
9 |
58,05 |
57,76 |
0,29 |
0,5% |
|
10 |
63,38 |
62,56 |
0,82 |
1,3% |
|
11 |
48,30 |
49,24 |
-0,94 |
1,9% |
|
12 |
57,24 |
55,70 |
1,54 |
2,8% |
|
13 |
57,14 |
55,70 |
1,44 |
2,6% |
|
14 |
63,38 |
62,56 |
0,82 |
1,3% |
|
15 |
63,82 |
64,45 |
-0,63 |
1,0% |
|
16 |
23,00 |
23,30 |
-0,30 |
1,3% |
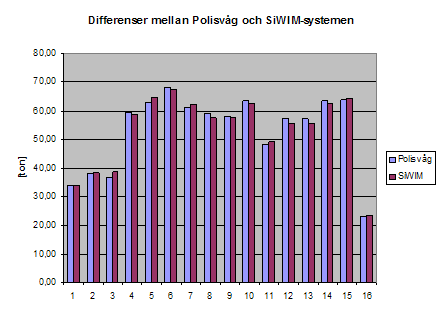
Diagram 7‑1 Vikter hos Polisvåg respektive SiWIM-systemen vid kontrollmätningar 2002.
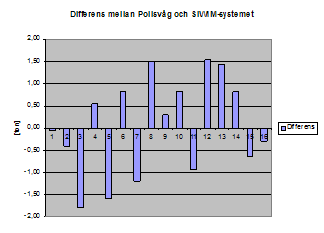
Diagram 7‑2 Differens i ton mellan Polisvåg och SiWIM-systemen vid kontrollmätningar 2002.

Diagram 7‑3 Procentuell differens mellan Polisvåg och SiWIM-systemen vid kontrollmätningar 2002.
8 GENERALISERINGAR AV MÄTDATA I TID OCH RUM
8.1 Bakgrund och syfte
Under år 2002 genomfördes BWIM-mätningar på ett antal försöksplatser. En förstudie om möjligheterna till att generalisera resultaten från enskilda mätningar både i tid och rum genomfördes också samt att ett första förslag till statistisk modell arbetades fram. För att kunna generalisera i tid och rum behövs nedanstående:
§ Generalisering i tiden
Här behövs studier av lasters variationsmönster över tiden på olika vägtyper. Syftet är dels att förstå variationsmönstret i enskilda mätpunkter, dels att se om hjälpinformation i form av generella variationskurvor kan tas fram. I det senare fallet behövs kunskap om vilka olika mönster som finns och på vilka vägar de uppträder.
§ Generalisering i rummet
För generalisering i rummet behövs omfattande mätningar. Dessa kan samordnas med mätningar för generalisering i tiden men har ett något annorlunda syfte. Mätningarna skall leda fram till en gruppering av vägar med likartad lastfördelning på årsbasis (variationsmönstret över årstider är dock ointressant här). Mätningar kan eventuellt kompletteras med information från enkätstudier av lastbilstransporter.
Det återstår åtskilligt arbete innan en generalisering kan genomföras. Under 2003 har följande studier gjorts:
§ Utvärdering av 2002 års mätningar. Här finns viktig information som kan ge vägledning för dimensionering av fortsatta mätningar.
§ Undersöka om det kan finnas lämpliga surrogat för helårsmätningar.
§ Utveckling av en modell för att klassificera vägar. Här behövs data från 2002 års mätningar, enkätundersökningar samt flödesmätningar.
§ Utreda om flödesmätningar kan användas för att klassificera vägnätet (behövs för att kunna generalisera enskilda mätningar till ett vägnät).
§ Undersöka om det finns ett samband mellan flödesdata och viktdata och om det finns ett samband utreda hur det ser ut.
§ Utreda möjligheterna för ett nationellt kontrollprogram för viktmätningar.
Detta uppdrag har genomförts i samarbete mellan Gösta Forsman, Ssat och Ingela Stenbäck, Konsult Trafik.
8.2
Mått
och modeller
för generalisering av mätdata
I avsnitten nedan beskrivs vad som krävs för att kunna
generalisera BWIM-mätningar från ett urval av mätplatser och/eller mätperioder till
ett vägnät eller till ett helt år. En förutsättning för sådana generaliseringar
är man kan gruppera vägnätet efter olika lastmönster varför tänkbara sätt att
göra detta också beskrivs.
8.2.1 Generalisering av mätdata i tid och rum
Det finns ett behov av lastdata som gäller generellt för ett helt år eller ett helt vägnät och inte enbart den bro och den tidsperiod då mätningarna utförts. Den vetenskapliga metod som först bör prövas när ett sådant behov finns är att utnyttja stickprovsteorin, dvs. man genomför mätningar på ett antal slumpmässigt placerade punkter och under ett antal slumpmässigt valda dagar. En sådan metod är för BWIM-data möjlig när det gäller generalisering i tiden. Generalisering i rummet kan dock inte göras med stickprovsteorin som grund, dels av kostnadsskäl, dels pga. att broar inte ligger på slumpmässigt valda platser. I stället får man här försöka att generalisera resultat från ett antal mätplatser enligt ett antagande, en modell, för hur verkligheten ser ut. Kostnaderna för löpande undersökningar kan med en modell reduceras avsevärt men å andra sidan blir resultaten riktiga endast om modellen är sann. Det är därför nödvändigt att från början förvissa sig om att den är sann.
8.2.2 Generalisering i tiden
Vi tänker oss mätningar i en punkt. Hur skall då mätdata från några veckor generaliseras till ett helt år med hygglig noggrannhet? Den enda metoden att göra detta är att helårsmäta lasterna i punkten för att därigenom få kunskap om variationen över tiden. Först därefter kan man fastställa nödvändig stickprovsstorlek, dvs. hur många mätdagar som behövs. Det är dock troligt att stickprovsstorleken skulle bli besvärande stor. I detta läge finns möjligheten att använda hjälpinformation av något slag. Om man kan fastställa att lastmönstret är stabilt år efter år kan man under en följd av år använda en ”årsvariationskurva” över lasterna som hjälpinformation. Denna kurva måste ha fastställts genom helårsmätning. Det blir i praktiken nödvändigt att använda en och samma variationskurva för många olika vägar. En avgörande fråga är då om man kan gruppera vägar med liknande variationsmönster.
En motsvarighet till det här beskrivna förfarandet har länge använts vid skattningar av årsmedeldygnstrafiken (ÅDT). Stickprovsstorleken har där med variationskurvor kunnat reduceras till fyra mättillfällen per år om vardera några få dagar. Om det är möjligt att komma ned till så små urval när det gäller laster beror på hur lasterna varierar över tiden samt förstås på vilka precisionskrav som finns. Det kan nog sägas redan nu att precisionskraven måste sättas lägre än för ÅDT.
8.2.3 Generalisering i rummet
När vi diskuterar generalisering av enskilda broars mätvärden till ett vägnät förutsätter vi nedan att helårsmätningar kan göras på varje bro alternativt att skattningar för helår med god noggrannhet är möjliga att ta fram.
Hur bör ett mått vara konstruerat här? Vi har bedömt att ett generellt mått på viktbelastningen på ett vägnät ska spegla den totala belastningen (summan) av alla tunga fordon som trafikerar vägnätet. Måttet bör variera både med lastvikterna och flödena. Måttet skall vidare användas både för nivåer och förändringar. Eftersom olika aspekter av laster skall kunna följas upp appliceras måttet på tre variabler, som alla kan mätas i en enstaka punkt: vikt, antal standardaxlar och övervikt. Nedan föreslår vi sammanfattande mått (parametrar) på nivåer och förändringar, samt en modell för att skatta dessa parametrar.
Anmärkning 1. Det bör understrykas att såväl måtten som skattningsmodellen har karaktären av en ”skiss”. Ett statistiskt mått bör utvecklas i nära diskussion med dem som ska använda dem. Det kan finnas andra mått än de föreslagna som är av intresse och andra skattningsmodeller kan diskuteras.
Modell och
parametrar
Vi tänker oss att ett vägnät, t.ex. Europavägar, delas in i ett antal vägsträckor som sedan grupperas (stratifieras). Vägsträckorna antas vara trafikhomogena så att flödet i princip är konstant inom varje sträcka. Vi utgår också från att vägsträckorna i princip är ”lasthomogena” så att lasterna är konstanta inom varje sträcka, dvs. av- och pålastningar ska i stort sett inte förekomma på sträckan. Vägsträckorna antas också vara homogena med avseende på tunga fordons (axlars) vikter så att fördelningen av sådana vikter är likartad för alla vägsträckor inom ett stratum. Vi antar också att aktuella och tillförlitliga flödesskattningar kan fås från ÅDT.
Stratifieringen är här nyckeln till ett gott resultat.
Lyckas man med den kan man räkna med användbara lastdata även på vägar som inte
mäts. Det finns, i princip, två sätt att få fram informationsunderlag för
stratifieringen: fältmätningar inom projektets ram och utnyttjande av andra
datakällor. Fältmätningar är bäst men krävs på ett stort antal platser.
De blir därigenom mycket kostnadskrävande. Andra datakällor kan vara
möjliga som underlag för stratifiering, se även 8.3.
Vi definierar nu en lämplig parameter och beskriver den för variabeln ”fordonsvikt”. Ett mått som kan användas för att följa den totala viktbelastningen på ett vägnät är
![]()
där
T = den totala viktbelastningen i ton.
![]() = det
totala trafikarbetet för tunga fordon i stratum h under ett år.
= det
totala trafikarbetet för tunga fordon i stratum h under ett år.
![]() = medelvärdet
i fordonviktsfördelningen för stratum h.
= medelvärdet
i fordonviktsfördelningen för stratum h.
Anmärkning 2. T, A och
![]() kan avse alla fordon
(axlar) eller olika delgrupper av fordon (axlar). Man kan säga att T är den totala viktbelastningen på
varje meter väg på det aktuella vägnätet.
kan avse alla fordon
(axlar) eller olika delgrupper av fordon (axlar). Man kan säga att T är den totala viktbelastningen på
varje meter väg på det aktuella vägnätet.
Anmärkning 3.
Viktfördelningen och därmed![]() skulle i princip kunna ändra sig under olika årstider.
Utredningar behövs för att ta reda på detta. Någon form av
”genomsnittsfördelning” behöver då tas fram.
skulle i princip kunna ändra sig under olika årstider.
Utredningar behövs för att ta reda på detta. Någon form av
”genomsnittsfördelning” behöver då tas fram.
Anmärkning 4. Parametern T kan även definieras som ”total
övervikt på vägnätet”. Medelvärdet ![]() avser då fördelningen
för övervikt per fordon. Man kan också låta
avser då fördelningen
för övervikt per fordon. Man kan också låta ![]() avse medelvärde i axelfördelningar
men då måste flödena f uttryckas i antal axlar. På motsvarande sätt kan man
definiera ett mått som speglar ”totalt antal standardaxlar på vägnätet”.
avse medelvärde i axelfördelningar
men då måste flödena f uttryckas i antal axlar. På motsvarande sätt kan man
definiera ett mått som speglar ”totalt antal standardaxlar på vägnätet”.
Nivåskattning
En skattning av T behöver nu inte baseras på stickprovsteorin med slumpmässigt valda punkter inom strata. Under antagandena ovan kan man välja en lämplig bro på en utvald sträcka inom varje stratum och från denna få de fordons/axelvikter som behövs. (Mätning av flera broar per stratum är naturligtvis att föredra eftersom antagandena inte kommer att vara helt uppfyllda i praktiken.)
En skattning, ![]() , av T kan nu
skrivas
, av T kan nu
skrivas
![]()
där ![]() är
trafikarbetsskattningar och
är
trafikarbetsskattningar och![]() skattas från en eller flera vägsträckor (broar) i
stratumet.
skattas från en eller flera vägsträckor (broar) i
stratumet.
Förändringsskattning
Förändringen mellan två år, t och t-1, skriver vi ![]() . Vi skattar den med
. Vi skattar den med
![]()
![]()
Osäkerhetsmått
Osäkerhetsmått för skattningarna av nivåer och förändringar kan inte tas fram med de metoder som används vid stickprovsbaserade undersökningar. Osäkerheten beror framförallt av hur man lyckas med stratifieringen, men även osäkerhet i ÅDT-skattningar kommer att spela en viktig roll.
Ett vanligt förhållande vid stickprovsmätningar är att förändringsskattningar är betydligt säkrare än nivåskattningar. Detta kommer att gälla även här.
8.3 Datakällor som kan utnyttjas för stratifiering av vägnät
8.3.1
Undersökningen
Inrikes trafik med svenska lastbilar (UVAV)
Undersökningen Inrikes trafik med svenska lastbilar (UVAV) har genomförts årligen och kvartalsvis sedan 1972 och fram till och med 1999. Från och med år 2000 heter undersökningen Inrikes och utrikes trafik med svenska lastbilar. Undersökningen genomförs av SCB på uppdrag av SIKA.
SCB har konstaterat att det finns en efterfrågan om uppgifter var på vägnätet godset transporteras. Ett test har därför gjorts med att lägga ut insamlat data om godstransporterna på vägnätet. I undersökningen efterfrågas inte vilka vägar som godset transporteras på utan endast på- och avlastningsorter. Utifrån ett ruttplaneringsprogram har man gjort antaganden om att körningarna gjorts på den naturligaste vägen mellan på- och avlastningsorterna.
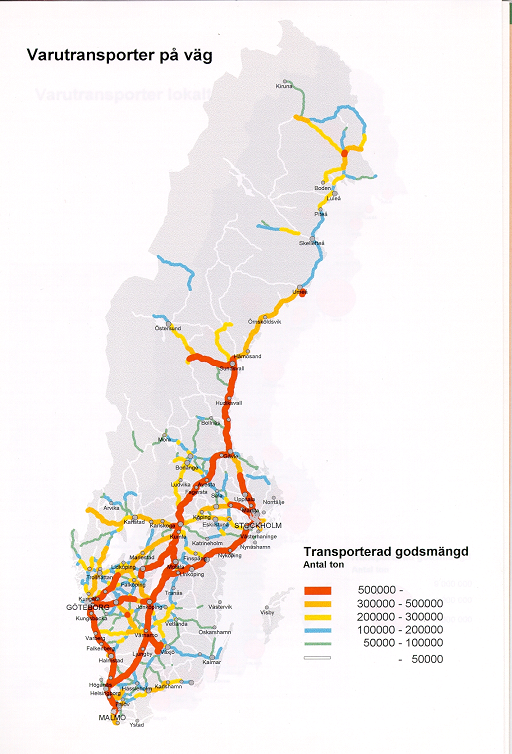
Transporterna visualiseras genom att samtliga transporter på vägnätet förs till de vägavsnitt och mellan de orter som angetts i de insamlade underlagen. Transporterna aggregeras därefter per vägsträcka och läggs ut på karta med en färg och en bredd som styrs av godsmängden. (I bilaga 1 visas kartan från det genomförda testet.)
Med den tillgängliga kunskap som för närvarande finns tror vi att det kan vara möjligt att använda denna metod för att ta fram godsmängd per vägsträcka. Detta material kan sedan användas för att stratifiera vägnätet på det sätt som behövs för att kunna generalisera mätningarna.
Informationen i detta avsnitt är hämtad dels från SCB:s hemsida, dels från samtal med Kerstin Forssén, SCB.
8.3.2
Samgods
Samgods är ett modellsystem för analyser inom godstransportområdet. Inom Samgods finns ett system, STAN (Strategic Transport ANalysis), för flödesanalyser av godstransporter.
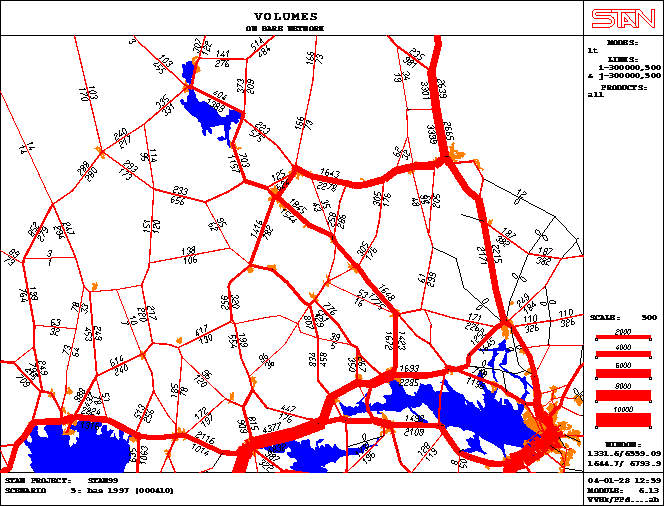
Med hjälp av STAN finns möjligheten att lägga ut godsflödet
i ton på vägnätet. Resultatet visas i form av en karta som visar godsflödet
riktningsuppdelat. Utifrån en sådan bild skulle det kunna vara möjligt att
stratifiera vägnätet efter modellerat godsflöde. I bilaga 2 finns en sådan
karta som illustrerar godsflödet för ett vägnät (observera att denna karta
bygger på en testkörning).
8.4 Analyser av BWIM-data
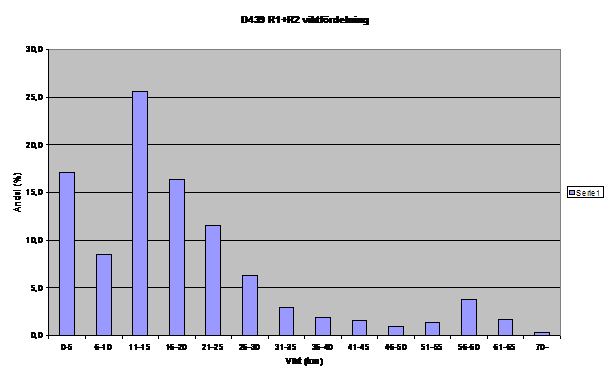
Data från BWIM-mätningarna som genomfördes under år 2002 har sammanställts och analyserats. Syftet har varit dels att titta på viktfördelningen vid respektive mätplats, dels att undersöka om det finns ett samband mellan viktdata och flödesdata. Ambitionen är alltså inte att titta på överlaster vilket är BWIM-projektets egentliga syfte. Sammanställningen finns i sin helhet bilaga 3.
Underlaget som analyserat är för litet för att några
långtgående slutsatser skall kunna dras. De jämförelser som gjorts mellan
antalet uppmätta fordon och skattade ÅDT-värden för mätplatsen stämmer i några
fall ganska bra medan de i andra fall inte alls stämmer särskilt bra. Hänsyn
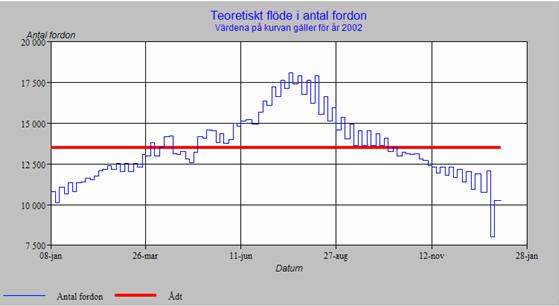
har tagits till flödets variation över året med hjälp av de indexkurvor som
tilldelats varje mätavsnitt vid ÅDT-mätningarna. Vissa skillnader kan kanske
förklaras med det bortfall som finns i BWIM-mätningarna men i några mätplatser
är skillnaderna mellan de uppmätta värdena och ÅDT-värdena för stora för att
man skall kunna dra den slutsatsen.
Möjligheten att dra slutsatser från BWIM-data kommer successivt att förbättras när data från fler mätplatser kan användas; dels redan gjorda mätningar från 2003, dels mätningar som nedan föreslås inom ramen för ett kontrollprogram under åren 2004-2007. Det är svårt att måla upp en situation när man i någon mening har fått tillräckligt bra underlag för att kunna göra generaliseringar. Kunskaper om lastflöden får byggas upp steg för steg. Ett viktigt dataunderlag för generaliseringar är som ovan påpekats helårsmätningar på strategiskt valda platser. Sådana är dock inte genomförbara inom överskådlig tid och kräver eventuellt en ny generation mätutrustning.
8.5 Kontrollprogram
I brist på ett färdigt skattningssystem enligt ovan behövs ett kontrollprogram under de närmast kommande åren för att följa utvecklingen av laster i landet. Syftet med kontrollprogrammet är att via ett fåtal mätningar samla ihop en informationsbild för hela landet. De tillgängliga resurserna kommer inte att vara tillräckliga för skattningar av nivåer eller förändringar enligt avsnitt 8.2.2och 8.2.3 ovan. Däremot kan kontrollprogrammet ge en indikation på om förändringar inträffar i utvecklingen av laster eller om tillståndsbilden är ungefär densamma som 2002-03 (eventuella förändringars storlek kan dock inte skattas).
Ett nationellt kontrollprogram för perioden 2004-2007 föreslås enligt följande.
- Mätningar görs på europavägar, riksvägar och andra vägar av speciellt intresse ur transportsynpunkt. Vid valet av mätpunkt kan hänsyn tas till vad det är för typ av trafik i denna punkt, t.ex. linjetrafik, transittrafik, sammansättning av godsflöden, etc. Spridning över olika trafiktyper eftersträvas.

- Varje plats kan mätas under en vecka per år, om möjligt under samma vecka år efter år. Uppräkning av mätresultaten till helår kan inte göras utan förändringen baseras på enbart på denna veckomätning. För jämförbarheten över år bör man därför vara speciellt observant på att förutsättningarna för mätresultaten ej ändrats mellan åren, på grund av t.ex. nybyggda vägar eller speciella lokala arrangemang under mätveckan som påverkar trafikflödet.
- Befintlig utrustning begränsar antalet mätplatser i det nationella kontrollprogrammet till två per region. Valet av broar skall vara balanserat på nationell nivå. Det kan innebära att olika väg- och trafiktyper mäts i olika regioner. Arbetsgången blir att styrgruppen inhämtar förslag på lämpliga mätplatser från regionerna och väljer mätplatser bland dessa.
8.6
Sammanfattning
och fortsatt arbete
Generalisering i
tiden
Här behövs studier av lasters variationsmönster över tiden på olika vägtyper. Syftet är dels att förstå variationsmönstret i enskilda punkter, dels att se om hjälpinformation i form av generella variationskurvor kan tas fram. I det senare fallet behövs kunskap om vilka olika mönster som finns och på vilka vägar de uppträder. Vi ser därmed två konkreta uppgifter:
- Utvärdering av 2003 års mätningar och kommande mätningar från det föreslagna kontrollprogrammet. Här finns viktig information som kan ge vägledning för dimensioneringen av 2) nedan.
- Helårsmätningar eller lämpliga surrogat för helårsmätningar på ett antal platser.
Generalisering i
rummet
Även för generalisering i rummet behövs omfattande mätningar. Dessa kan samordnas med mätningarna enligt ovan men har ett något annorlunda syfte. Mätningarna skall leda fram till en gruppering av vägar med likartad lastfördelning på årsbasis (variationsmönstret över årstider är dock ointressant här). Mätningar kan eventuellt kompletteras med information från enkätstudier av lastbilstransporter och/eller STAN-systemet. Vi har tre uppgifter här:
- Utvärdering av 2003 års mätningar. Även här kan vi få vägledning för dimensioneringen av fortsatta mätningar.
- Fältmätningar på ett antal olika vägtyper.
- Utveckling av en modell för att klassificera vägar. Här behövs data från fältmätningar, från nämnda enkätundersökningar av laster samt från flödesmätningar.
9 TEKNISK UTVÄRDERING AV SiWIM-SYSTEMET
9.1 Driftsmässiga synpunkter
SiWIM systemet är ett resultat av modern forskning. Det ger utmärkt resultat för både axel- och fordonsvikter och har goda förutsättningar att kunna användas generellt. Systemet är dock inte helt färdigutvecklat, det bör göras uppgraderingar som både kan förenkla handhavandet och förbättra resultatet. Ett starkt önskemål är eliminering av slangarna och vägning av flera fordon på bron samtidigt. FAD (Free of Axel Detectors) har testats under 2003 med gott resultat, men är inte analyserat i detalj
9.1.1 Montering/uppstart
Med erfaren personal går monteringen relativt snabbt, 3-5 timmars effektiv tid beroende på mätplats (trafik under bron, brolängd/bredd etc.). Uppsättning av skåp kräver två personer, i övrigt kan man klara det med en person.
Strömförsörjning fram till bron bör göras av behörig elektriker innan utrustningen monteras. Strömförsörjning kan även ske via batteridrift, vilket också utökar antalet broar som lämpar sig för mätningar.
Parametersättning innebär inga större problem förutom inställningar av triggernivå för axelsignaler som kräver viss tid i anspråk. Val av influenslinje kan bli ganska tidsödande då man för högsta precision bör använda tvåaxliga bussar eller lastbilar med axelavstånd >5.5 m. Dessa kan man få vänta på.
Under de senare montagen 2003 har SiWIM protocolV006 ENG använts, detta är en checklista som fältpersonal följer för att verifiera/dokumentera mätplats och system. Protokollet återfinns i bilagorna till denna rapport. Denna kommer att användas som metodbeskrivning för fälverksamheten.
9.1.2 Kalibrering
Kalibrering har hittills skett med lastbil med släp (7-axlig) och dessa kräver ganska stora vändplatser, vilka kan vara svåra att finna. Kalibreringen tar mycket tid om vändplatserna ligger långt från bron. Det får heller inte vara för hög trafik på mätplatsen eftersom kalibreringsbilen måste vara ensam på bron, alternativet blir nattkalibrering.
Kalibreringen är utförd enligt European WIM specification Test plan 1.1, med 1 lastad långtradare och minst 10 st godkända överfarter per riktning (6 st överfarter normal hastighet, 2 st överfarter vardera 20 % under resp. över normal hastighet).
Med godkända överfarter menas rätt kodat kalibreringsfordon och att överfarten skett utan påverkan från övriga fordon.
Efter dessa krav är uppfyllda kan kalibreringsfaktor för varje riktning sättas, när detta är klart överförs site (mätplats) data till fältdator och mätningen kan startas.
Innan mätning avslutas på en mätplats bör en ny viktkontroll
ske, antingen med kalibreringsbilen eller genom poliskontrollmätning. Eventuell
drift kan hänga samman med några graders temperaturskillnad. Denna kontroll bör
således ske på varje mätplats för att säkerställa mätkvalitet.
9.2 Slutkommentarer
9.2.1 Hårdvara
Systemen fungerar någorlunda bra driftsmässigt men viss översyn bör göras med avseende på val av kapslingsklass för kontakter och dylikt. Tester med att köra systemen med endast batterikraft har inte genomförts ännu.
Ytterligare tester med FAD-mätning av passerade axlar måste genomföras innan tekniken kan användas fullt ut.
Så kallad rackmontering av komponenterna i skåpet bör införas för att underlätta flytten mellan olika mätplatser.
GSM-modemet saknar strömbrytare, vilket innebär att kapslingen måste öppnas och en bygling flyttas för att starta respektive stänga av det (stängs av då system inte ska vara i drift, exempelvis vid transporter).
Separata hårddiskar som samlar in mätdata är önskvärt eftersom tiden för att överföra data till en extern hårddisk är tidskrävande. Det finns kanske en lösning på detta problem då man har komprimering av mätdata under utveckling.
Med hänsyn till arbetsmiljön och personalens säkerhet bör
broar med mitträcken undvikas. Vidare kan risker för trafikanterna uppstå om
kablarna lossnar från kanten av en refug och sedan blir ”hängande”. Dessa kan
sedan slå upp eller trassla in sig i passerande fordon
9.2.2 Mjukvara
Under projektets gång har mjukvarorna förbättrats avsevärt i
fråga om översiktlighet, logik och användarvänlighet.
10 SLUTORD
10.1 Mätsystemet
Installationen av mätutrustningen är en kritisk punkt för
lyckade mätningar. Det är viktigt att systemet och installationen inte skadas
på grund av åverkan.
Ett exempel är från VM3 - Storvik där systemet ”kördes på” så att töjningsgivarna skadades.

Detta berodde på att den fria höjden under bron inte var tillräcklig för det användningsområde som, i princip den ende, brukaren hade.
Ordningen i mätskåpet är viktig så att man inte genererar elektriska störningar i batteriets gel-laddare. Dessa störningar kan försvåra efterbearbetningen av mätdata, särskilt innebär detta att mätsignalen inte kan återgå till nollnivån vid avslutad mätning. Ett sådant fel ger svårigheter vid uttolkning av mätningen.
Översyn och kontroll av hårdvaran är mycket viktig att genomföra, regelbunden vård av utrustningen underlättar i alla steg av processen.
Systemen är känsliga för åskväder, en automatik finns inbyggd i systemen så att de kan starta om automatiskt vid händelse av åsknedslag.
Jordning av systemen är mycket viktig. Otillräcklig jordning inducerar brus i mätningarna som systemen och dess programvara ibland inte kan filtrera bort. Detta introducerar onödiga störningar vid analysarbetet.
10.2 Kalibreringen
Kalibreringen måste utföras så noggrant som möjligt, efterbearbetningen av mätdata blir mycket smidigare om så är fallet. Detta är synnerligen viktigt även ur den aspekten att brister i kalibreringen kan innebära att vi över tiden får sämre mätprecision.
Förfarandet vi använt under projektet har byggt på att montage, igångsättning samt kalibrering genomförs i en följd utan mellanliggande mätning. Det är dock tekniskt möjligt att montera systemet och starta mätningarna för att sedan efter några dagar genomföra kalibreringen. De fordon som vägts före kalibreringen kan sedan ”vägas om” direkt i datorn. Detta förfarande har dock inte testats eller används under projekttiden.
Även om kalibreringen utförs så noggrant som är möjligt kan det ibland vara så att bron och vägytan sätter gränser för hur effektiv mätningen blir. I slutändan påverkar detta analysarbetet.
10.3 Efterbearbetning
Mängden data som samlas in gör att detta är en relativt tidsödande process. I de fall då kalibrering av systemet utförts bra i fält kan efterbearbetning och analys av data ta cirka två timmar i anspråk per mätdygn.
Den i särklass största och viktigaste faktorn för att få efterbearbetningen att löpa smidigt är mängden tunga fordon som passerar under mätningarna. Är det många tunga fordon, mer än 1000, kan efterbearbetningen ta mycket lång tid. Den totala mängd trafik som passerar är också viktig eftersom den genererar större eller mindre sannolikhet för att två fordon samtidigt finns på bron.
Klassificering av fordon bygger på en fordonsdatabas som tagits fram under projektets gång. Mängden fordon som inte kan klassificeras varierar kraftigt från mätplats till mätplats. Exempelvis närhet till en ort med militära förband gör att mängden ej klassificerade fordon ökar. Dessutom blir fordon med åtta, nio och tio axlar vanligare och vanligare på det stora vägnätet, dessa utgör en del av ”transittrafiken”.
Programvaran som användes vid efterbearbetning heter SiWIM-D. Hantering av detta analysverktyg var från början mycket besvärligare än vad som först antogs. Programvaran förbättrades dock avsevärt i enlighet med önskemål från VV. Ytterligare ett analyshjälpmedel togs fram av Vägverket för att klara diagramframställning och vissa efterbearbetningar av rapporter som genereras av analysprogramvaran.
10.4 Resultaten
Nedbrytningseffekten av ett överlastat eller fellastat fordon kan variera eftersom B-faktorn och överlastfrekvensen inte samvarierar. Detta innebär att en hög frekvens av överlastade fordon inte automatiskt innebär en hög B-faktor.
Hastigheten hos den tunga trafiken är relativt hög.
Vi har ett problem med överlaster både ur bruttoviktssynpunkt och ur axellastsynpunkt. Övervikt på axellaster innebär att vi har fellastade fordon som i och för sig klarar bruttovikten men skapar onödigt vägslitage.
Förekomsten av riktigt stora bruttovikter, mer än 75 ton, är sällsynt.
Mätprecisionen ligger inom 5 % vilket innebär att man inte bör utnyttja detta system för automatisk vägning och beivring av överlast. Under de mätningar som genomfördes i samarbete med polisen under 2002 uppnåddes en medelavvikelse på 1,7 % mellan mätsystemet och polisens mobila vågar.
Skillnaden mellan resultaten som beräknats med en tolerans om 2% (under 2002) eller 5 % (under 2003) på vikterna och de resultat som inte har någon tolerans är mycket liten, detta innebär att de allra flesta fordonspassager som identifierats som överlast, antingen på bruttovikt eller axelvikt, verkligen är överlastade. I rapporten redovisade mätningar bygger på ofiltrerad data. Redovisning av filtrerad data finns för respektive mätplats i CD-bilagan till denna rapport.
10.5 Slutsatser
- Vi har ett problem med överlaster detta gäller både bruttovikt och axellaster. Övervikt på axellaster innebär att vi har fellastade fordon som i och för sig klarar bruttovikten men skapar onödigt vägslitage.
- Vi behöver öka vår kunskap om de faktiska lasterna. Även utan överlaster kan i en del fall de faktiska lasterna, uttryckt i antal standardaxlar per fordon (den s.k. B-faktorn) vara högre än vad vi tidigare antagit. B-faktorn och förekomst av överlaster samvarierar inte. B-faktorn varierar mer än vad som tidigare antagits.
- Vi behöver veta mer om hur faktiska laster varierar i relation till andel tung trafik. Den information som vi via projektet fått från ett fåtal platser behöver följas upp och kompletteras.
- De system vi köpt in är avsedda för riktade undersökningar. Metoden lämpar sig bäst för tillfälliga installationer under kortare perioder, mindre än tre veckor.
- Under testerna med långtidsmontage, mer än tre veckor, av utrustningarna framkom en del problem främst rörande lagring av data samt tillförlitlighet av varningssystemen i utrustningarna. Under dessa kontrollmätningar har vi uppnått goda resultat vid tre av fyra montage. Mätningarna har genomförts, i princip kontinuerligt, från mars till oktober.
- Om långtidsmontage, mer än tre veckor, skall tillämpas måste mellanliggande kontrollmätningar mot känd last utföras. Systemen är inte avsedda för permanenta installationer.
- Vi har tillgång till en mätmetod som med
tillräcklig noggrannhet gör det möjligt att få en tillståndsbild från
olika mätplatser.
- Validering av fordonsklassificeringen i systemen med hjälp av videofilmning på några platser har genomförts. Denna videofilmning analyserades och jämfördes sedan med det som systemen lagrat. En mycket god överensstämmelse mellan registrerade fordon i SiWIM-systemen och de som filmats kunde konstateras.
- Kompetens och kunskap måste byggas upp och spridas i organisationen.
- De hastigheter som mätts upp tyder på en något hög medelhastighet.
Utveckling av mätmetod och framtagning av en metodbeskrivning har genomförts i nära samarbete med ZAG och CESTEL i Ljubljana. Metodbeskrivningen som skrivits är författad av ZAG och finns i en engelsk version som fältorganisationen använt under arbetet 2003. Det är mycket viktigt att metodbeskrivningen följs och att mätplatserna dokumenteras utförligt.
11 BILAGOR
11.1 Resultat från mätningar 2002
11.1.1 Resultat Region Mitt, VM2 - Örnsköldsvik
Bruttoviktfördelning
![]()
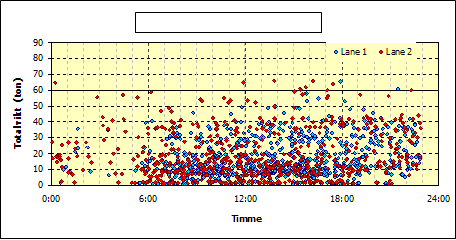
Histogram över fördelningen

Överlaster alla tunga fordon

Överlaster fordon lastade lika med eller över 35 ton

Överlaster fordon lastade mindre än 35 ton

Antalet standardaxlar per tungt fordon
Riktning 1 0,23
Riktning 2 0,41
Kommentar:
GVW – Gross Vehicle Weight – Brottovikt
GVW eller axellast: Detta är summan av de två vänstra kolumnerna.
Överlast med avseende på bruttovikt (GVW) innebär att maximalt tillåten bruttovikt för fordonet överskridits. Detta kan ske antingen genom att:
1 - endast bruttovikten överskrids, eller
2 - bruttovikt och axellasten för en eller flera axlar överskrids.
Då punkt 2 ovan inträffar räknas detta ej in i ”Endast axellast – kolumnen”, det vill säga en överlastat axel räknas endast en gång – antingen i ”Endast GVW” eller i ”Endast Axellast”.
Resultaten redovisar endast ett dygns mätning.
11.1.2 Resultat Region Mitt, VM3 - Storvik
Bruttoviktfördelning
![]()

Histogram över fördelningen

Överlast alla fordon

Överlast fordon med bruttovikt lika med eller större än 35 ton

Överlast fordon med bruttovikt mindre än 35 ton

Antalet standardaxlar per tungt fordon
Riktning 1 1,16
Riktning 2 1,56
Kommentar:
GVW – Gross Vehicle Weight – Brottovikt
GVW eller axellast: Detta är summan av de två vänstra kolumnerna.
Överlast med avseende på bruttovikt (GVW) innebär att maximalt tillåten bruttovikt för fordonet överskridits. Detta kan ske antingen genom att:
1 - endast bruttovikten överskrids, eller
2 - bruttovikt och axellasten för en eller flera axlar överskrids.
Då punkt 2 ovan inträffar räknas detta ej in i ”Endast axellast – kolumnen”, det vill säga en överlastat axel räknas endast en gång – antingen i ”Endast GVW” eller i ”Endast Axellast”.
Resultaten redovisar endast ett dygns mätning.
11.1.3 Resultat Region Mälardalen, VMN2 - Västerås
Bruttoviktsfördelning
![]()
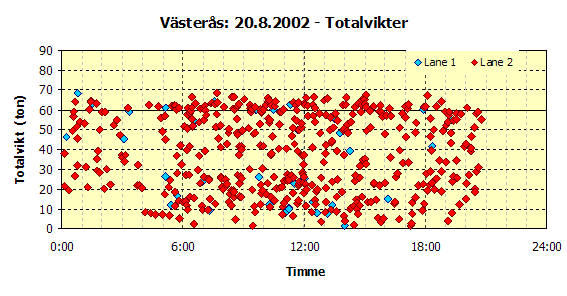
Histogram över fördelning
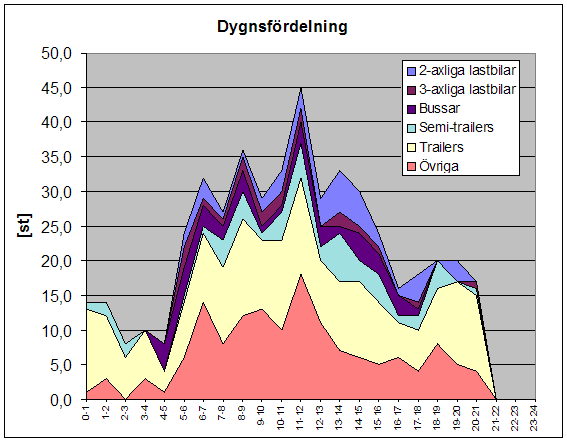

Överlaster alla fordon
Överlaster fordon lastade lika med eller mer än 35 ton

Överlaster fordon lastade mindre än 35 ton

Antalet standardaxlar per tungt fordon
Riktning 1 3,39
Riktning 2 3,87
Kommentar:
GVW – Gross Vehicle Weight – Brottovikt
GVW eller axellast: Detta är summan av de två vänstra kolumnerna.
Överlast med avseende på bruttovikt (GVW) innebär att maximalt tillåten bruttovikt för fordonet överskridits. Detta kan ske antingen genom att:
1 - endast bruttovikten överskrids, eller
2 - bruttovikt och axellasten för en eller flera axlar överskrids.
Då punkt 2 ovan inträffar räknas detta ej in i ”Endast axellast – kolumnen”, det vill säga en överlastat axel räknas endast en gång – antingen i ”Endast GVW” eller i ”Endast Axellast”.
Resultaten redovisar endast ett dygns mätning.
11.1.4 Resultat Region Mälardalen, VMN4 - Sparreholm
Totalviktsfördelning
![]()
Histogram över fördelningen
Överlaster alla fordon

Överlaster fordon lastade lika med eller mer än 35 ton

Överlaster fordon lastade mindre än 35 ton

Antalet standardaxlar per tungt fordon
Riktning 1 0,71
Riktning 2 0,55
Kommentar:
GVW – Gross Vehicle Weight – Brottovikt
GVW eller axellast: Detta är summan av de två vänstra kolumnerna.
Överlast med avseende på bruttovikt (GVW) innebär att maximalt tillåten bruttovikt för fordonet överskridits. Detta kan ske antingen genom att:
1 - endast bruttovikten överskrids, eller
2 - bruttovikt och axellasten för en eller flera axlar överskrids.
Då punkt 2 ovan inträffar räknas detta ej in i ”Endast axellast – kolumnen”, det vill säga en överlastat axel räknas endast en gång – antingen i ”Endast GVW” eller i ”Endast Axellast”.
Resultaten redovisar endast ett dygns mätning.
11.1.5 Resultat Region Väst, VVÄ1 - Färjelanda
Bruttoviktsfördelning
![]()

Histogram över fördelning


Överlaster alla fordon
Överlaster fordon lastade lika med eller över 35 ton

Överlaster för fordon lastade mindre än 35 ton har ej analyserats
Antalet standardaxlar per tungt fordon
Riktning 1 0,89
Riktning 2 0,93
Denna station har analyserats av ZAG i Ljubljana
Kommentar:
GVW – Gross
Vehicle Weight – Brottovikt
GVW eller axellast: Detta är summan av de två vänstra kolumnerna.
Överlast med avseende på bruttovikt (GVW) innebär att maximalt tillåten bruttovikt för fordonet överskridits. Detta kan ske antingen genom att:
1 - endast bruttovikten överskrids, eller
2 - bruttovikt och axellasten för en eller flera axlar överskrids.
Då punkt 2 ovan inträffar räknas detta ej in i ”Endast axellast – kolumnen”, det vill säga en överlastat axel räknas endast en gång – antingen i ”Endast GVW” eller i ”Endast Axellast”.
Resultaten redovisar endast ett dygns mätning.
11.1.6 Resultat Region Väst, VVÄ3 - Grästorp
Bruttoviktsfördelning
![]()

Histogram över fördelning


Överlaster alla fordon
Överlaster fordon lastade lika med eller mer än 35 ton

Överlaster fordon lastade mindre än 35 ton

Antalet standard axlar per tungt fordon
Riktning 1 1,87
Riktning 2 2,4
Kommentar:
GVW – Gross Vehicle Weight – Brottovikt
GVW eller axellast: Detta är summan av de två vänstra kolumnerna.
Överlast med avseende på bruttovikt (GVW) innebär att maximalt tillåten bruttovikt för fordonet överskridits. Detta kan ske antingen genom att:
1 - endast bruttovikten överskrids, eller
2 - bruttovikt och axellasten för en eller flera axlar överskrids.
Då punkt 2 ovan inträffar räknas detta ej in i ”Endast axellast – kolumnen”, det vill säga en överlastat axel räknas endast en gång – antingen i ”Endast GVW” eller i ”Endast Axellast”.
Resultaten redovisar endast ett dygns mätning.
11.1.7 Resultat Region Väst - VVÄ4 - Kinna
Bruttoviktsfördelning
Histogram över fördelningen

11.1.8 Resultat Region Sydöst, VSÖ1 - Forserum
Bruttoviktsfördelning
![]()
Histogram över fördelningen
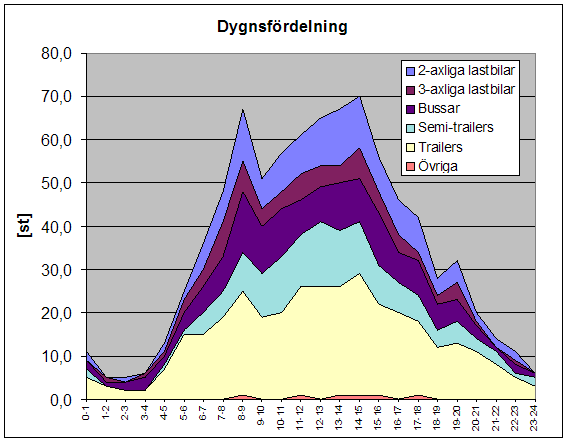
Överlaster alla fordon
Överlaster fordon lastade lika med eller mer än 35 ton

Överlaster för fordon lastade mindre än 35 ton är inte genomförd
Antalet standardaxlar per tungt fordon
Riktning 1 0,97
Riktning 2 0,91
Denna mätstation är analyserad av ZAG i Ljubljana
Kommentar:
GVW – Gross
Vehicle Weight – Brottovikt
GVW eller axellast: Detta är summan av de två vänstra kolumnerna.
Överlast med avseende på bruttovikt (GVW) innebär att maximalt tillåten bruttovikt för fordonet överskridits. Detta kan ske antingen genom att:
1 - endast bruttovikten överskrids, eller
2 - bruttovikt och axellasten för en eller flera axlar överskrids.
Då punkt 2 ovan inträffar räknas detta ej in i ”Endast axellast – kolumnen”, det vill säga en överlastat axel räknas endast en gång – antingen i ”Endast GVW” eller i ”Endast Axellast”.
Resultaten redovisar endast ett dygns mätning.
11.1.9 Resultat Region Sydöst, VSÖ2 - Lagan
Bruttoviktsfördelning

Histogram över fördelningen

Överlaster alla fordon

Överlaster fordon lastade lika med eller över 35 ton

Överlaster fordon lastade mindre än 35 ton

Antalet standardaxlar per tungt fordon
Riktning 1 2,68
Riktning 2 2,21
Kommentar:
GVW – Gross Vehicle Weight – Brottovikt
GVW eller axellast: Detta är summan av de två vänstra kolumnerna.
Överlast med avseende på bruttovikt (GVW) innebär att maximalt tillåten bruttovikt för fordonet överskridits. Detta kan ske antingen genom att:
1 - endast bruttovikten överskrids, eller
2 - bruttovikt och axellasten för en eller flera axlar överskrids.
Då punkt 2 ovan inträffar räknas detta ej in i ”Endast axellast – kolumnen”, det vill säga en överlastat axel räknas endast en gång – antingen i ”Endast GVW” eller i ”Endast Axellast”.
Resultaten redovisar endast ett dygns mätning.
11.1.10 Resultat Region Sydöst, VSÖ3 - Kalmar
Bruttoviktsfördelning
![]()

Histogram över fördelningen
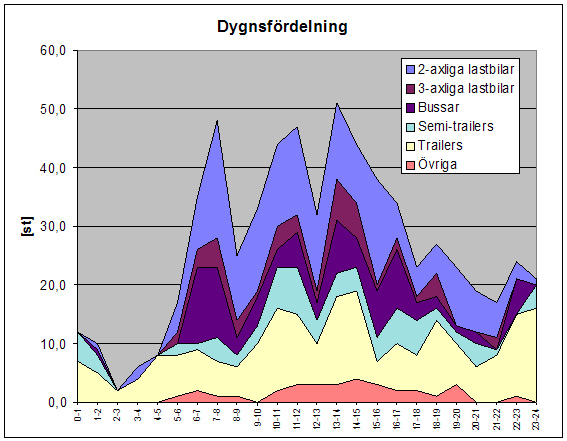
Överlaster alla fordon

Överlast fordon med bruttovikt lika med eller över 35 ton

Överlast fordon med bruttovikt under 35 ton

Antalet standardaxlar per tungt fordon
Riktning 1 1,37
Riktning 2 2,29
Kommentar:
GVW – Gross Vehicle Weight – Brottovikt
GVW eller axellast: Detta är summan av de två vänstra kolumnerna.
Överlast med avseende på bruttovikt (GVW) innebär att maximalt tillåten bruttovikt för fordonet överskridits. Detta kan ske antingen genom att:
1 - endast bruttovikten överskrids, eller
2 - bruttovikt och axellasten för en eller flera axlar överskrids.
Då punkt 2 ovan inträffar räknas detta ej in i ”Endast axellast – kolumnen”, det vill säga en överlastat axel räknas endast en gång – antingen i ”Endast GVW” eller i ”Endast Axellast”.
Resultaten redovisar endast ett dygns mätning.
11.2 Kartor över vissa brolägen
11.2.1
D 422 - Strängnäs


11.2.2
D 439 - Sparreholm


11.2.3
H 50 - Oskarshamn

11.2.4
P 1123 - Kinna


11.2.5
R 687 - Grästorp
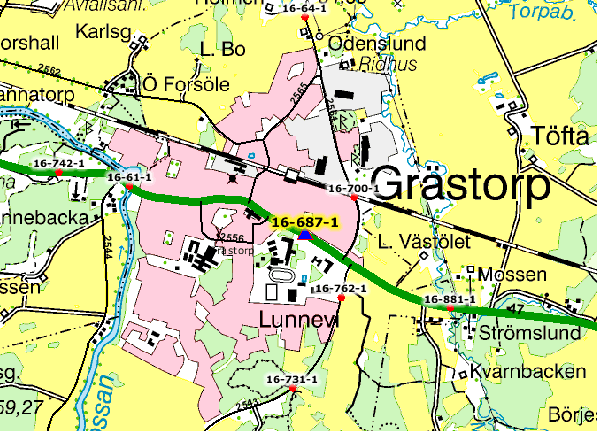
11.2.6
U 107 - Västerås

11.3 Fordonsklassificeringstabell
Föreliggande tabell utgör den fordonsklassificeringstabell som använts under analysarbetet.
Filnamn: vehicle_classes12-1tw.conf :
[classes]
list=10,20,21,22,30,31,32,40,41,50,51,52,53,54,55,56,57,58,60,61,62,70,71,72,73,74,75,76,77,78,79,80,81,82,83,84,85,90,91,92,93,94,95,96,97,98,99,100,101,102,103,104,110,111,112,113,114,115,116,120,121,122,123,124,130,131,132,133,134,135,136,137,138